 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKey Points Estimation and Point Instance Segmentation Approach for Lane Detection
Paper and Code
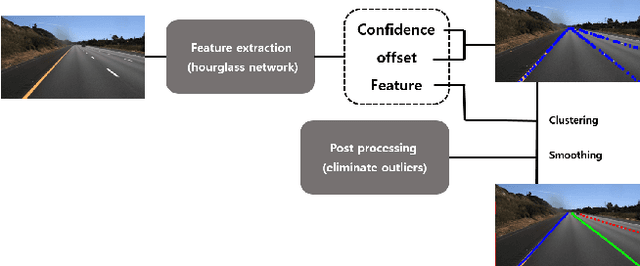
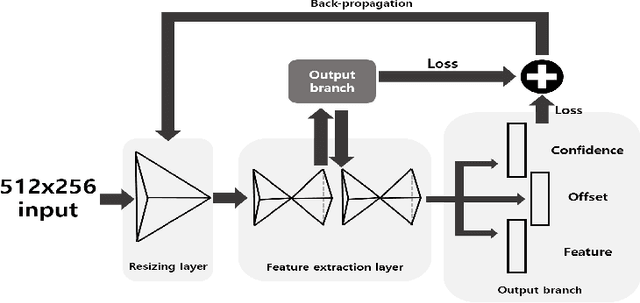
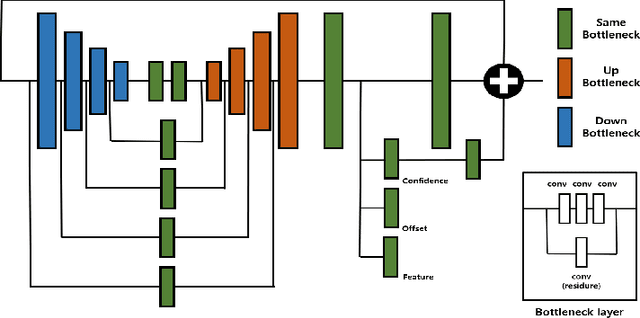
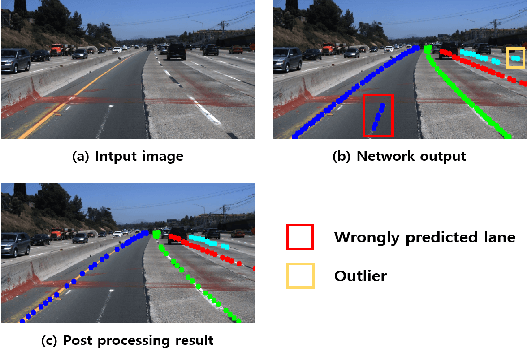
State-of-the-art lane detection methods achieve successful performance. Despite their advantages, these methods have critical deficiencies such as the limited number of detectable lanes and high false positive. In especial, high false positive can cause wrong and dangerous control. In this paper, we propose a novel lane detection method for the arbitrary number of lanes using the deep learning method, which has the lower number of false positives than other recent lane detection methods. The architecture of the proposed method has the shared feature extraction layers and several branches for detection and embedding to cluster lanes. The proposed method can generate exact points on the lanes, and we cast a clustering problem for the generated points as a point cloud instance segmentation problem. The proposed method is more compact because it generates fewer points than the original image pixel size. Our proposed post processing method eliminates outliers successfully and increases the performance notably. Whole proposed framework achieves competitive results on the tuSimple dataset.