 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIsolating and Leveraging Controllable and Noncontrollable Visual Dynamics in World Models
Paper and Code
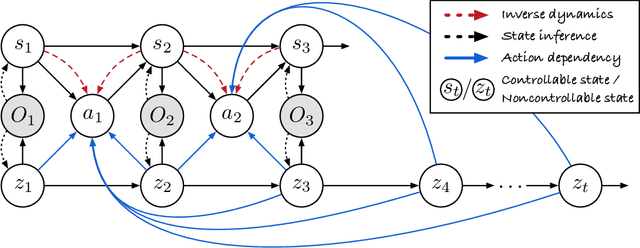
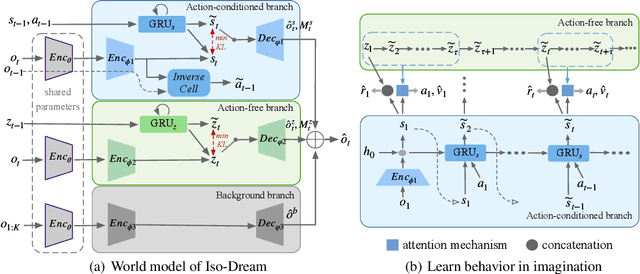

World models learn the consequences of actions in vision-based interactive systems. However, in practical scenarios such as autonomous driving, there commonly exists noncontrollable dynamics independent of the action signals, making it difficult to learn effective world models. To tackle this problem, we present a novel reinforcement learning approach named Iso-Dream, which improves the Dream-to-Control framework in two aspects. First, by optimizing the inverse dynamics, we encourage the world model to learn controllable and noncontrollable sources of spatiotemporal changes on isolated state transition branches. Second, we optimize the behavior of the agent on the decoupled latent imaginations of the world model. Specifically, to estimate state values, we roll-out the noncontrollable states into the future and associate them with the current controllable state. In this way, the isolation of dynamics sources can greatly benefit long-horizon decision-making of the agent, such as a self-driving car that can avoid potential risks by anticipating the movement of other vehicles. Experiments show that Iso-Dream is effective in decoupling the mixed dynamics and remarkably outperforms existing approaches in a wide range of visual control and prediction domains.