Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInverse Optimal Control from Demonstration Segments
Paper and Code
Oct 28, 2020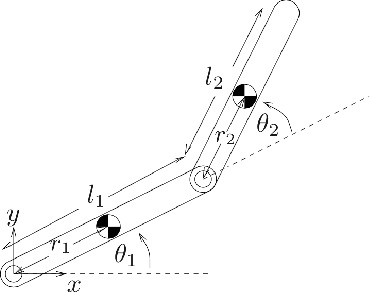
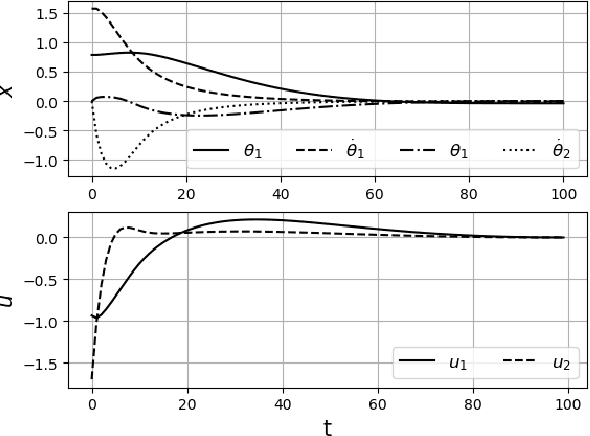
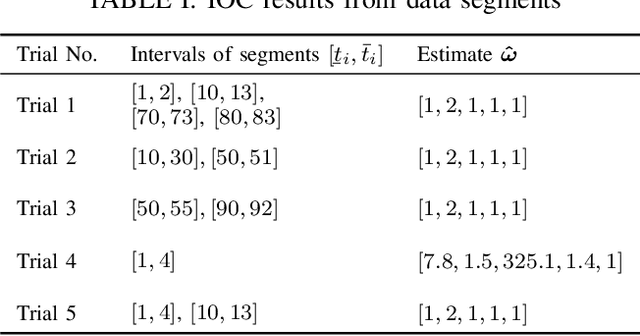
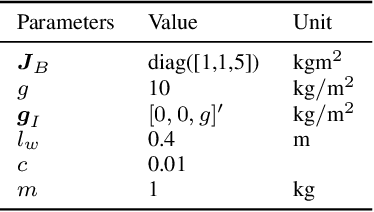
This paper develops an inverse optimal control method to learn an objective function from segments of demonstrations. Here, each segment is part of an optimal trajectory within any time interval of the horizon. The unknown objective function is parameterized as a weighted sum of given features with unknown weights. The proposed method shows that each trajectory segment can be transformed into a linear constraint to the unknown weights, and then all available segments are incrementally incorporated to solve for the unknown weights. Effectiveness of the proposed method is shown on a simulated 2-link robot arm and a 6-DoF maneuvering quadrotor system, in each of which only segment data of the systems' trajectories are available.
View paper on