 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntraoperative 2D/3D Image Registration via Differentiable X-ray Rendering
Paper and Code
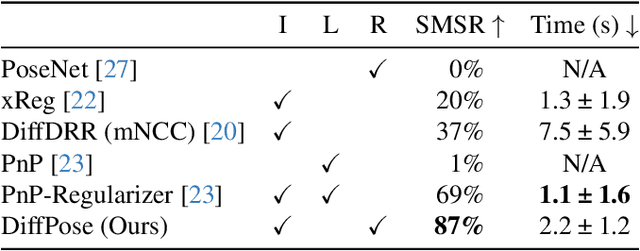
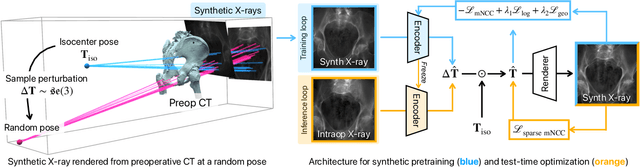
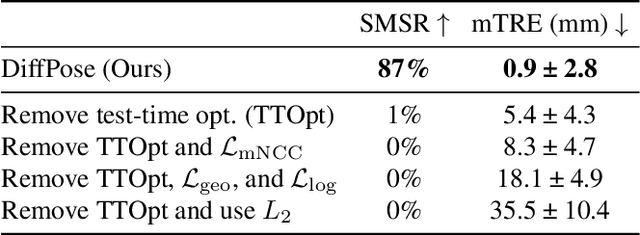
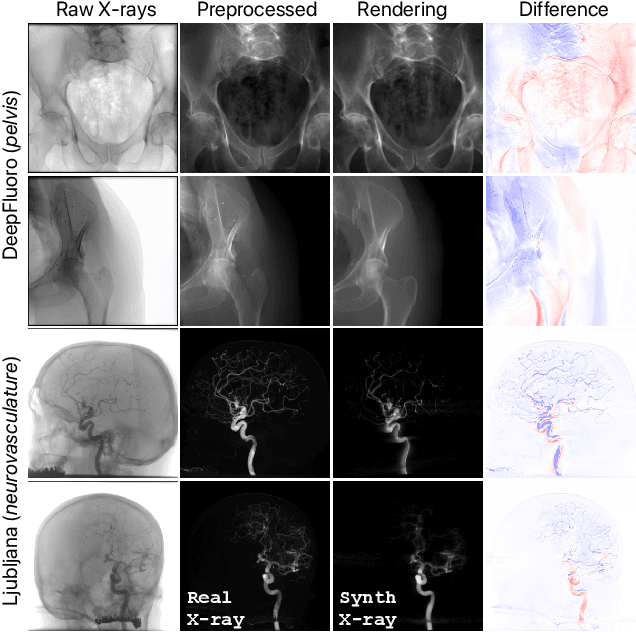
Surgical decisions are informed by aligning rapid portable 2D intraoperative images (e.g., X-rays) to a high-fidelity 3D preoperative reference scan (e.g., CT). 2D/3D image registration often fails in practice: conventional optimization methods are prohibitively slow and susceptible to local minima, while neural networks trained on small datasets fail on new patients or require impractical landmark supervision. We present DiffPose, a self-supervised approach that leverages patient-specific simulation and differentiable physics-based rendering to achieve accurate 2D/3D registration without relying on manually labeled data. Preoperatively, a CNN is trained to regress the pose of a randomly oriented synthetic X-ray rendered from the preoperative CT. The CNN then initializes rapid intraoperative test-time optimization that uses the differentiable X-ray renderer to refine the solution. Our work further proposes several geometrically principled methods for sampling camera poses from $\mathbf{SE}(3)$, for sparse differentiable rendering, and for driving registration in the tangent space $\mathfrak{se}(3)$ with geodesic and multiscale locality-sensitive losses. DiffPose achieves sub-millimeter accuracy across surgical datasets at intraoperative speeds, improving upon existing unsupervised methods by an order of magnitude and even outperforming supervised baselines. Our code is available at https://github.com/eigenvivek/DiffPose.