 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpreting video features: a comparison of 3D convolutional networks and convolutional LSTM networks
Paper and Code
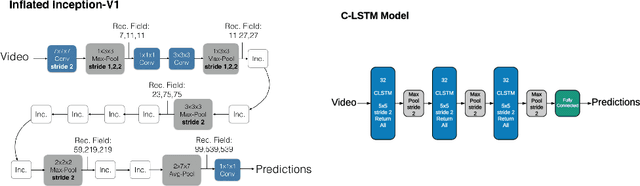

A number of techniques for interpretability have been presented for deep learning in computer vision, typically with the goal of understanding what it is that the networks have actually learned underneath a given classification decision. However, when it comes to deep video architectures, interpretability is still in its infancy and we do not yet have a clear concept of how we should decode spatiotemporal features. In this paper, we present a study comparing how 3D convolutional networks and convolutional LSTM networks learn features across temporally dependent frames. This is the first comparison of two video models that both convolve to learn spatial features but that have principally different methods of modeling time. Additionally, we extend the concept of meaningful perturbation introduced by Fong & Vedaldi (2017) to the temporal dimension to search for the most meaningful part of a sequence for a classification decision.