Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Brain-Inspired Representations Improve RL Performance on Visual Navigation Tasks
Paper and Code
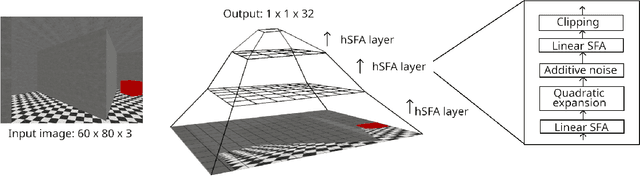
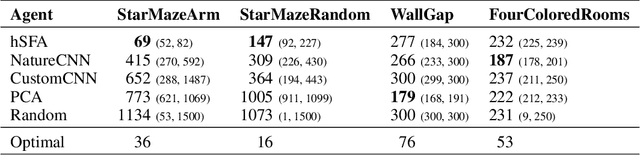
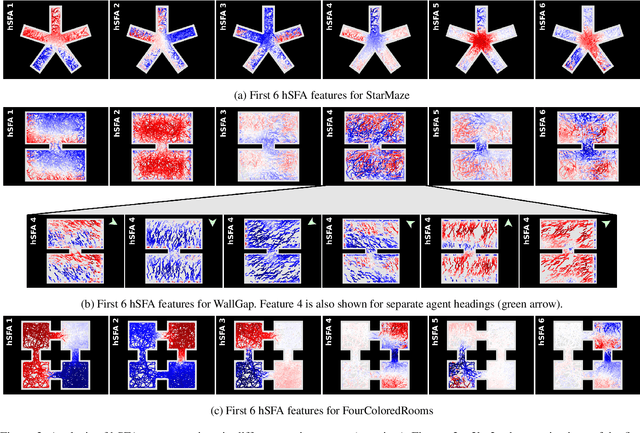
Visual navigation requires a whole range of capabilities. A crucial one of these is the ability of an agent to determine its own location and heading in an environment. Prior works commonly assume this information as given, or use methods which lack a suitable inductive bias and accumulate error over time. In this work, we show how the method of slow feature analysis (SFA), inspired by neuroscience research, overcomes both limitations by generating interpretable representations of visual data that encode location and heading of an agent. We employ SFA in a modern reinforcement learning context, analyse and compare representations and illustrate where hierarchical SFA can outperform other feature extractors on navigation tasks.
* Accepted at XAI4DRL workshop at AAAI 2024
View paper on