 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable and Flexible Target-Conditioned Neural Planners For Autonomous Vehicles
Paper and Code
Sep 23, 2023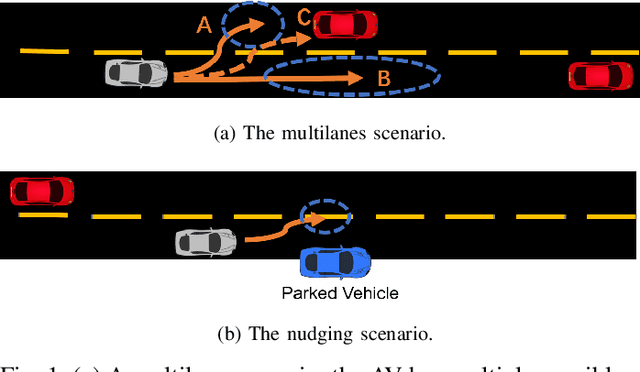



Learning-based approaches to autonomous vehicle planners have the potential to scale to many complicated real-world driving scenarios by leveraging huge amounts of driver demonstrations. However, prior work only learns to estimate a single planning trajectory, while there may be multiple acceptable plans in real-world scenarios. To solve the problem, we propose an interpretable neural planner to regress a heatmap, which effectively represents multiple potential goals in the bird's-eye view of an autonomous vehicle. The planner employs an adaptive Gaussian kernel and relaxed hourglass loss to better capture the uncertainty of planning problems. We also use a negative Gaussian kernel to add supervision to the heatmap regression, enabling the model to learn collision avoidance effectively. Our systematic evaluation on the Lyft Open Dataset across a diverse range of real-world driving scenarios shows that our model achieves a safer and more flexible driving performance than prior works.