 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Robot Transition Repair With SMT
Paper and Code
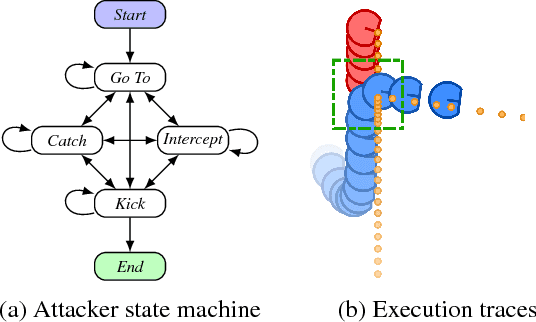
Complex robot behaviors are often structured as state machines, where states encapsulate actions and a transition function switches between states. Since transitions depend on physical parameters, when the environment changes, a roboticist has to painstakingly readjust the parameters to work in the new environment. We present interactive SMT-based Robot Transition Repair (SRTR): instead of manually adjusting parameters, we ask the roboticist to identify a few instances where the robot is in a wrong state and what the right state should be. A lightweight automated analysis of the transition function's source code then 1) identifies adjustable parameters, 2) converts the transition function into a system of logical constraints, and 3) formulates the constraints and user-supplied corrections as MaxSMT problem that yields new parameter values. Our evaluation shows that SRTR is effective on real robots and in simulation. We show that SRTR finds new parameters 1) quickly, 2) with only a few corrections, and 3) that the parameters generalize to new scenarios. We also show that a simple state machine corrected by SRTR can out-perform a more complex, expert-tuned state machine in the real world.