 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Autonomous Intersection Management
Paper and Code
Feb 09, 2022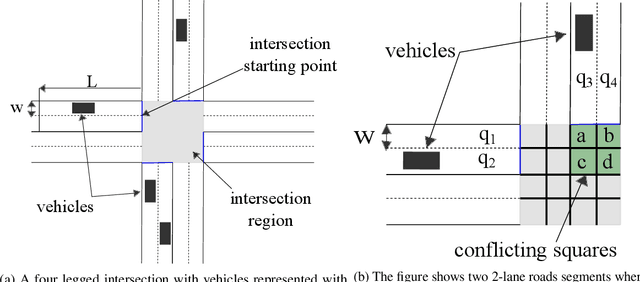
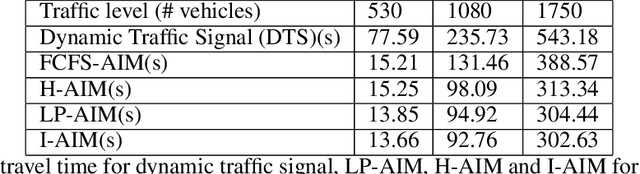
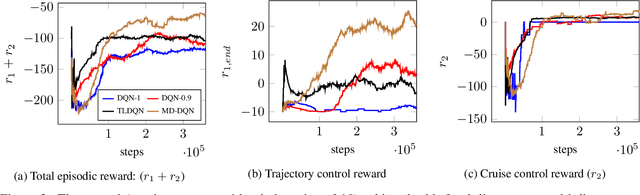
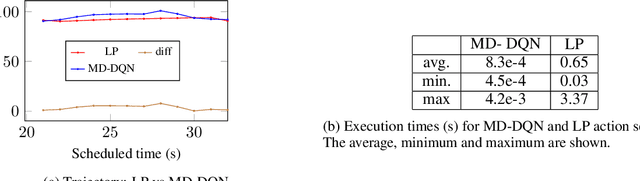
Connected Autonomous Vehicles will make autonomous intersection management a reality replacing traditional traffic signal control. Autonomous intersection management requires time and speed adjustment of vehicles arriving at an intersection for collision-free passing through the intersection. Due to its computational complexity, this problem has been studied only when vehicle arrival times towards the vicinity of the intersection are known beforehand, which limits the applicability of these solutions for real-time deployment. To solve the real-time autonomous traffic intersection management problem, we propose a reinforcement learning (RL) based multiagent architecture and a novel RL algorithm coined multi-discount Q-learning. In multi-discount Q-learning, we introduce a simple yet effective way to solve a Markov Decision Process by preserving both short-term and long-term goals, which is crucial for collision-free speed control. Our empirical results show that our RL-based multiagent solution can achieve near-optimal performance efficiently when minimizing the travel time through an intersection.