 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegration of navigation and action selection functionalities in a computational model of cortico-basal ganglia-thalamo-cortical loops
Paper and Code
Jan 03, 2006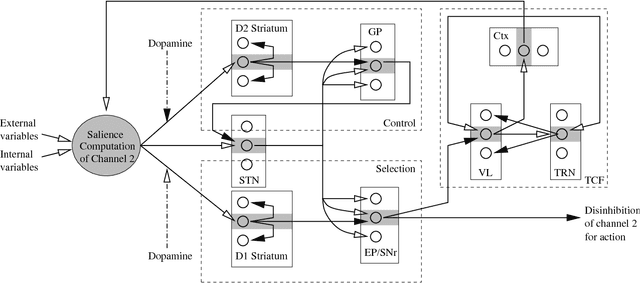
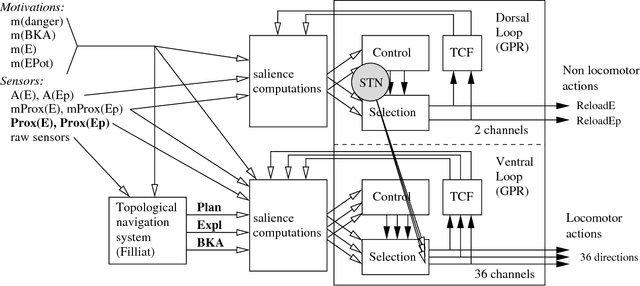
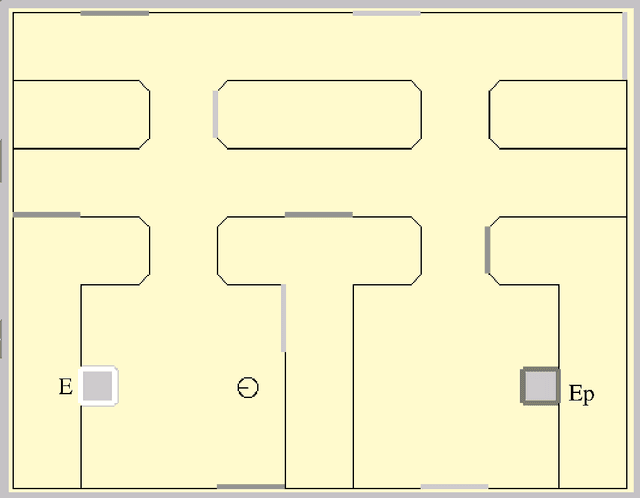
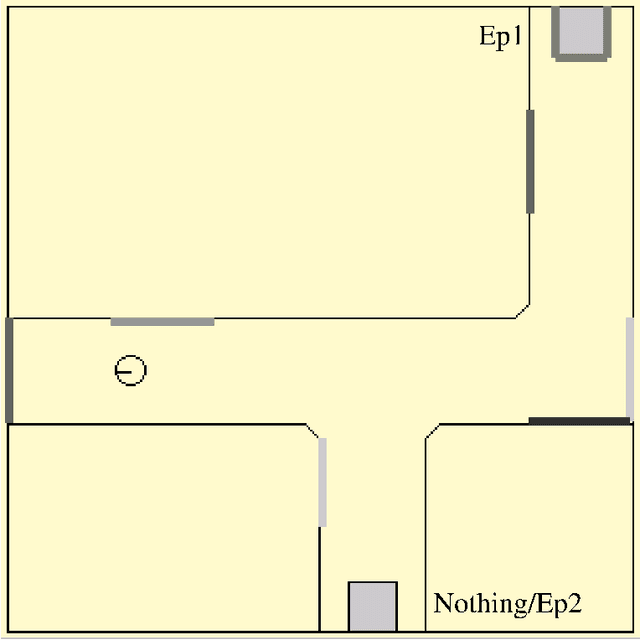
This article describes a biomimetic control architecture affording an animat both action selection and navigation functionalities. It satisfies the survival constraint of an artificial metabolism and supports several complementary navigation strategies. It builds upon an action selection model based on the basal ganglia of the vertebrate brain, using two interconnected cortico-basal ganglia-thalamo-cortical loops: a ventral one concerned with appetitive actions and a dorsal one dedicated to consummatory actions. The performances of the resulting model are evaluated in simulation. The experiments assess the prolonged survival permitted by the use of high level navigation strategies and the complementarity of navigation strategies in dynamic environments. The correctness of the behavioral choices in situations of antagonistic or synergetic internal states are also tested. Finally, the modelling choices are discussed with regard to their biomimetic plausibility, while the experimental results are estimated in terms of animat adaptivity.