 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInstance Segmentation of Visible and Occluded Regions for Finding and Picking Target from a Pile of Objects
Paper and Code
Jan 21, 2020
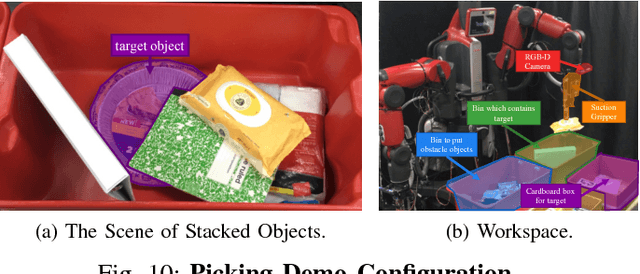
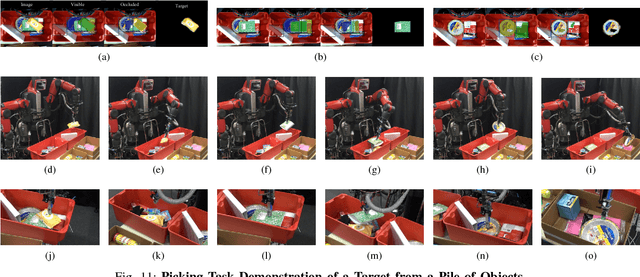
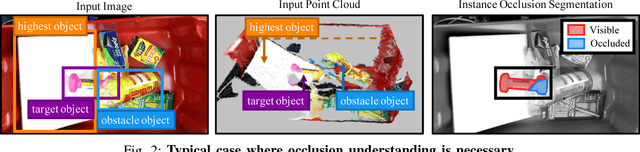
We present a robotic system for picking a target from a pile of objects that is capable of finding and grasping the target object by removing obstacles in the appropriate order. The fundamental idea is to segment instances with both visible and occluded masks, which we call `instance occlusion segmentation'. To achieve this, we extend an existing instance segmentation model with a novel `relook' architecture, in which the model explicitly learns the inter-instance relationship. Also, by using image synthesis, we make the system capable of handling new objects without human annotations. The experimental results show the effectiveness of the relook architecture when compared with a conventional model and of the image synthesis when compared to a human-annotated dataset. We also demonstrate the capability of our system to achieve picking a target in a cluttered environment with a real robot.