 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeINPC: Implicit Neural Point Clouds for Radiance Field Rendering
Paper and Code
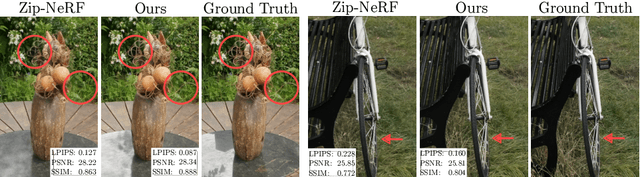
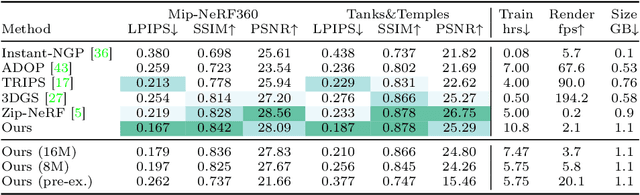
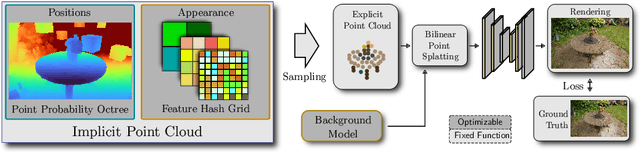
We introduce a new approach for reconstruction and novel-view synthesis of unbounded real-world scenes. In contrast to previous methods using either volumetric fields, grid-based models, or discrete point cloud proxies, we propose a hybrid scene representation, which implicitly encodes a point cloud in a continuous octree-based probability field and a multi-resolution hash grid. In doing so, we combine the benefits of both worlds by retaining favorable behavior during optimization: Our novel implicit point cloud representation and differentiable bilinear rasterizer enable fast rendering while preserving fine geometric detail without depending on initial priors like structure-from-motion point clouds. Our method achieves state-of-the-art image quality on several common benchmark datasets. Furthermore, we achieve fast inference at interactive frame rates, and can extract explicit point clouds to further enhance performance.