 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformation-Theoretic Stochastic Optimal Control via Incremental Sampling-based Algorithms
Paper and Code
May 28, 2014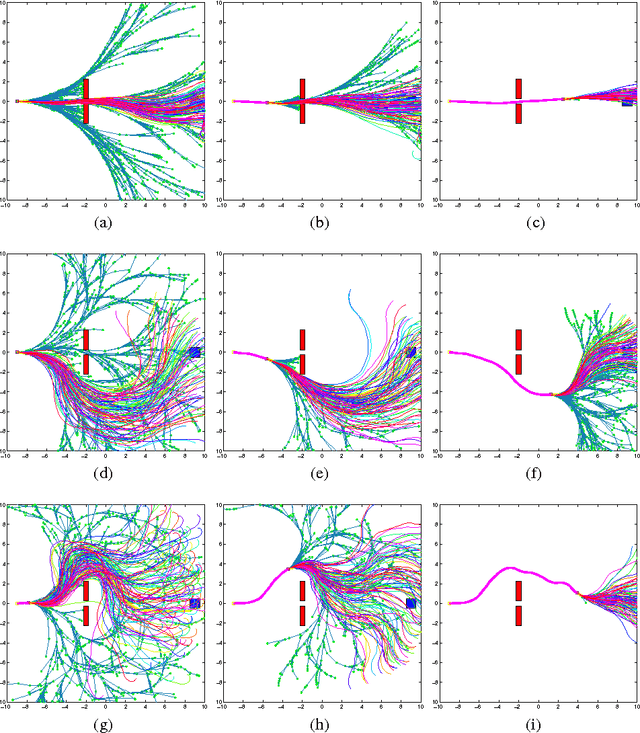



This paper considers optimal control of dynamical systems which are represented by nonlinear stochastic differential equations. It is well-known that the optimal control policy for this problem can be obtained as a function of a value function that satisfies a nonlinear partial differential equation, namely, the Hamilton-Jacobi-Bellman equation. This nonlinear PDE must be solved backwards in time, and this computation is intractable for large scale systems. Under certain assumptions, and after applying a logarithmic transformation, an alternative characterization of the optimal policy can be given in terms of a path integral. Path Integral (PI) based control methods have recently been shown to provide elegant solutions to a broad class of stochastic optimal control problems. One of the implementation challenges with this formalism is the computation of the expectation of a cost functional over the trajectories of the unforced dynamics. Computing such expectation over trajectories that are sampled uniformly may induce numerical instabilities due to the exponentiation of the cost. Therefore, sampling of low-cost trajectories is essential for the practical implementation of PI-based methods. In this paper, we use incremental sampling-based algorithms to sample useful trajectories from the unforced system dynamics, and make a novel connection between Rapidly-exploring Random Trees (RRTs) and information-theoretic stochastic optimal control. We show the results from the numerical implementation of the proposed approach to several examples.