Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformation Theoretic Model Predictive Control: Theory and Applications to Autonomous Driving
Paper and Code

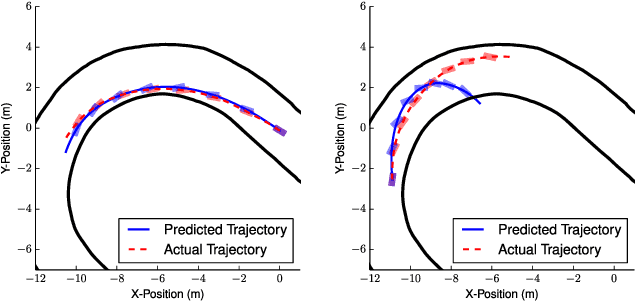
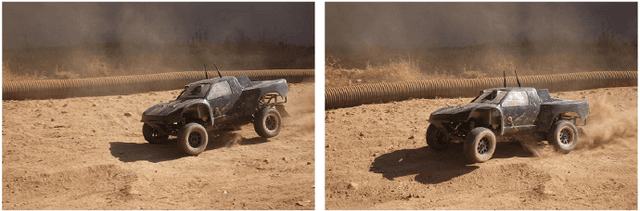
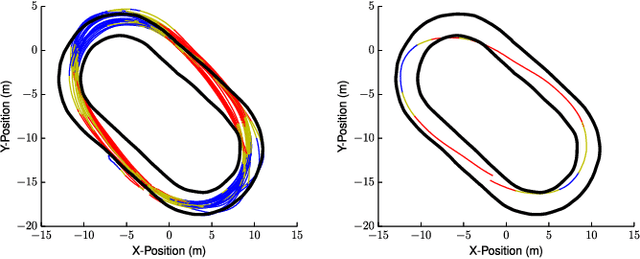
We present an information theoretic approach to stochastic optimal control problems that can be used to derive general sampling based optimization schemes. This new mathematical method is used to develop a sampling based model predictive control algorithm. We apply this information theoretic model predictive control (IT-MPC) scheme to the task of aggressive autonomous driving around a dirt test track, and compare its performance to a model predictive control version of the cross-entropy method.
* 20 pages, 12 figures, submitted to Transactions on Robotics (T-RO)
View paper on