 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndependent Modular Networks
Paper and Code
Jun 02, 2023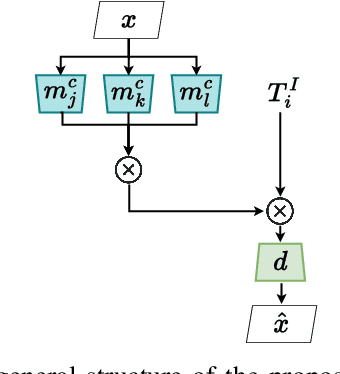
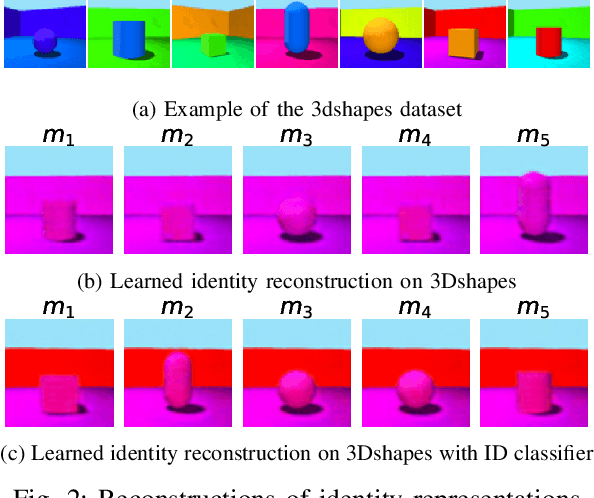
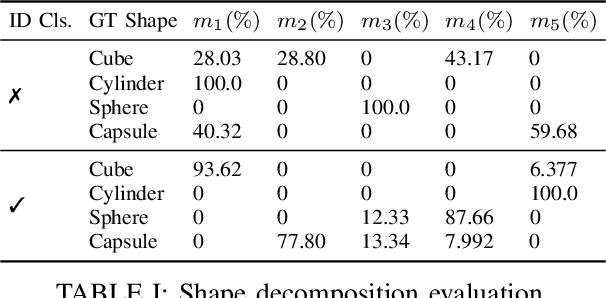
Monolithic neural networks that make use of a single set of weights to learn useful representations for downstream tasks explicitly dismiss the compositional nature of data generation processes. This characteristic exists in data where every instance can be regarded as the combination of an identity concept, such as the shape of an object, combined with modifying concepts, such as orientation, color, and size. The dismissal of compositionality is especially detrimental in robotics, where state estimation relies heavily on the compositional nature of physical mechanisms (e.g., rotations and transformations) to model interactions. To accommodate this data characteristic, modular networks have been proposed. However, a lack of structure in each module's role, and modular network-specific issues such as module collapse have restricted their usability. We propose a modular network architecture that accommodates the mentioned decompositional concept by proposing a unique structure that splits the modules into predetermined roles. Additionally, we provide regularizations that improve the resiliency of the modular network to the problem of module collapse while improving the decomposition accuracy of the model.