 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncorporating Explanations into Human-Machine Interfaces for Trust and Situation Awareness in Autonomous Vehicles
Paper and Code
Apr 10, 2024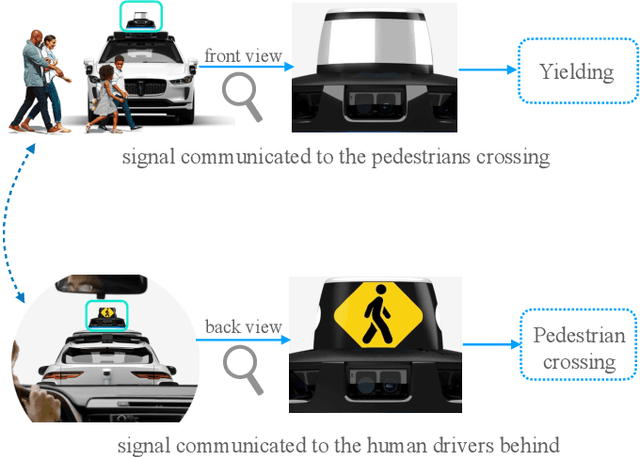
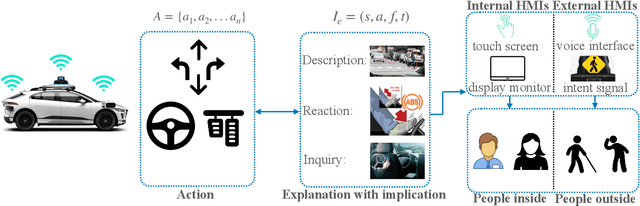
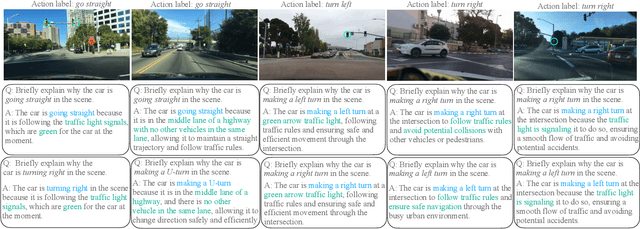
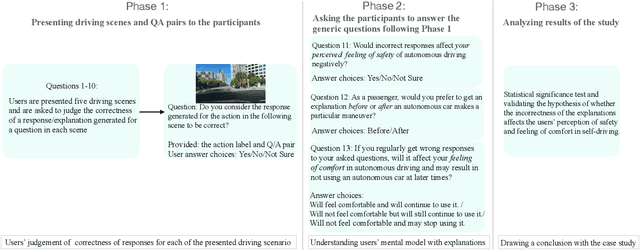
Autonomous vehicles often make complex decisions via machine learning-based predictive models applied to collected sensor data. While this combination of methods provides a foundation for real-time actions, self-driving behavior primarily remains opaque to end users. In this sense, explainability of real-time decisions is a crucial and natural requirement for building trust in autonomous vehicles. Moreover, as autonomous vehicles still cause serious traffic accidents for various reasons, timely conveyance of upcoming hazards to road users can help improve scene understanding and prevent potential risks. Hence, there is also a need to supply autonomous vehicles with user-friendly interfaces for effective human-machine teaming. Motivated by this problem, we study the role of explainable AI and human-machine interface jointly in building trust in vehicle autonomy. We first present a broad context of the explanatory human-machine systems with the "3W1H" (what, whom, when, how) approach. Based on these findings, we present a situation awareness framework for calibrating users' trust in self-driving behavior. Finally, we perform an experiment on our framework, conduct a user study on it, and validate the empirical findings with hypothesis testing.