 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-Hand Following of Deformable Linear Objects Using Dexterous Fingers with Tactile Sensing
Paper and Code
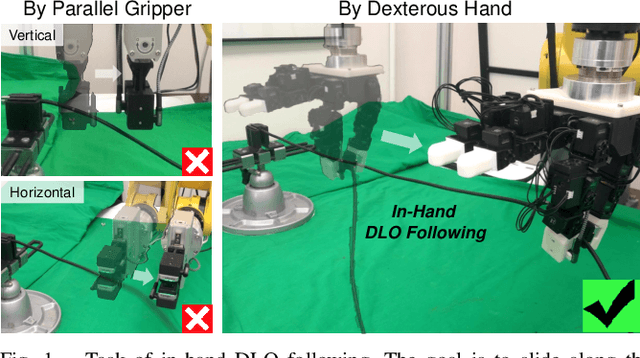

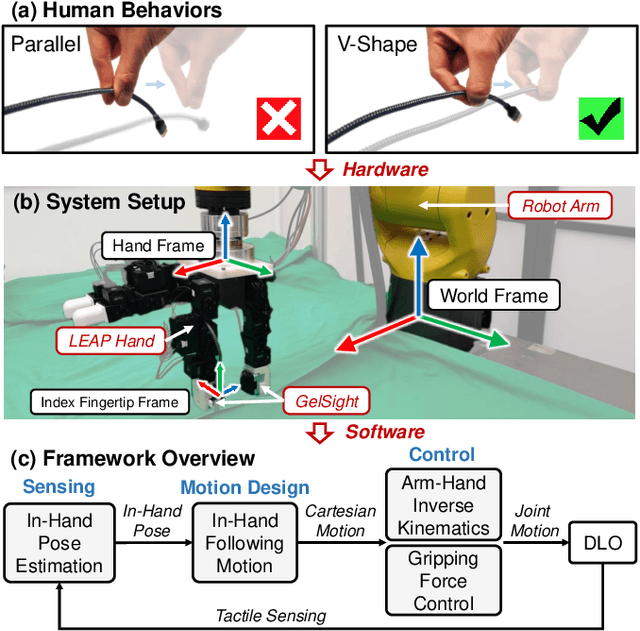
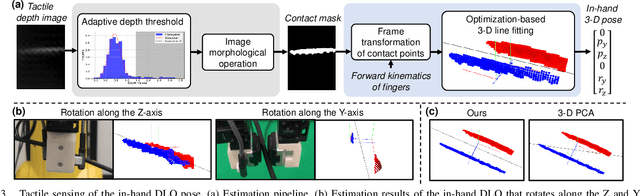
Most research on deformable linear object (DLO) manipulation assumes rigid grasping. However, beyond rigid grasping and re-grasping, in-hand following is also an essential skill that humans use to dexterously manipulate DLOs, which requires continuously changing the grasp point by in-hand sliding while holding the DLO to prevent it from falling. Achieving such a skill is very challenging for robots without using specially designed but not versatile end-effectors. Previous works have attempted using generic parallel grippers, but their robustness is unsatisfactory owing to the conflict between following and holding, which is hard to balance with a one-degree-of-freedom gripper. In this work, inspired by how humans use fingers to follow DLOs, we explore the usage of a generic dexterous hand with tactile sensing to imitate human skills and achieve robust in-hand DLO following. To enable the hardware system to function in the real world, we develop a framework that includes Cartesian-space arm-hand control, tactile-based in-hand 3-D DLO pose estimation, and task-specific motion design. Experimental results demonstrate the significant superiority of our method over using parallel grippers, as well as its great robustness, generalizability, and efficiency.