 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn a Nutshell, the Human Asked for This: Latent Goals for Following Temporal Specifications
Paper and Code
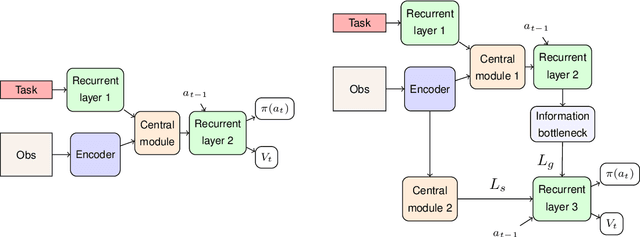
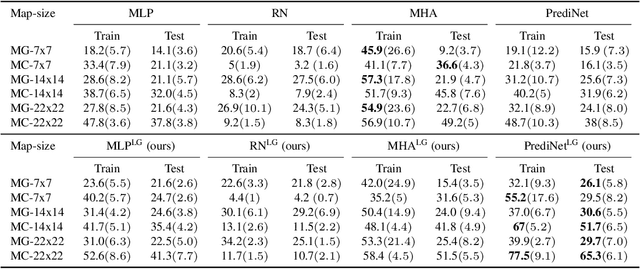
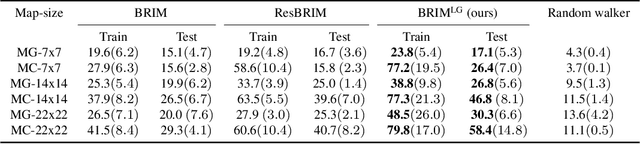
We address the problem of building agents whose goal is to satisfy out-of distribution (OOD) multi-task instructions expressed in temporal logic (TL) by using deep reinforcement learning (DRL). Recent works provided evidence that the deep learning architecture is a key feature when teaching a DRL agent to solve OOD tasks in TL. Yet, the studies on their performance are still limited. In this work, we analyse various state-of-the-art (SOTA) architectures that include generalisation mechanisms such as relational layers, the soft-attention mechanism, or hierarchical configurations, when generalising safety-aware tasks expressed in TL. Most importantly, we present a novel deep learning architecture that induces agents to generate latent representations of their current goal given both the human instruction and the current observation from the environment. We find that applying our proposed configuration to SOTA architectures yields significantly stronger performance when executing new tasks in OOD environments.