 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImVoxelNet: Image to Voxels Projection for Monocular and Multi-View General-Purpose 3D Object Detection
Paper and Code
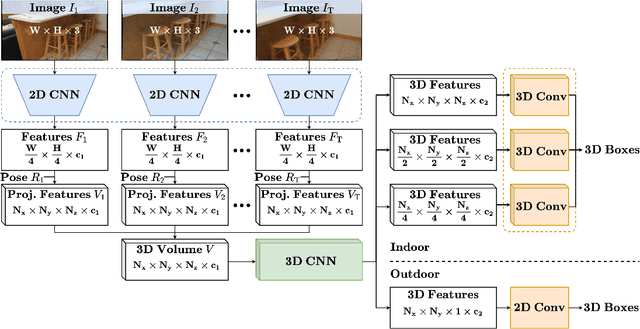
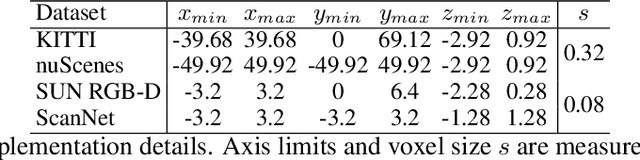
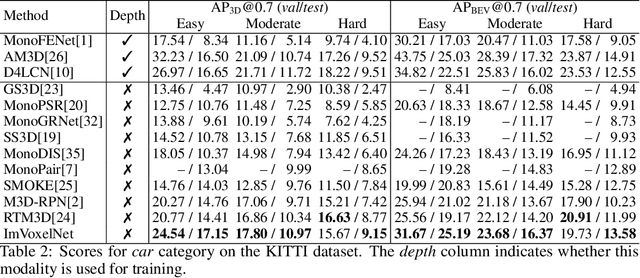
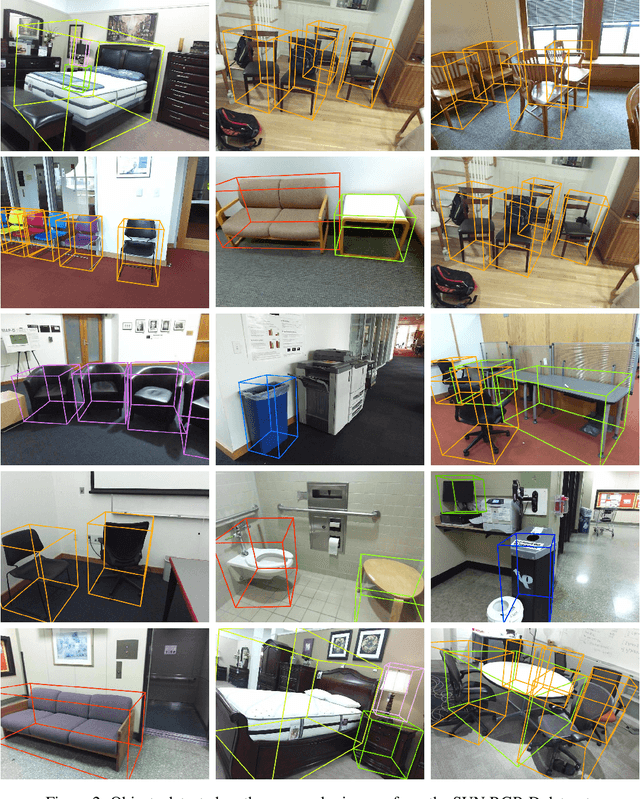
In this paper, we introduce the task of multi-view RGB-based 3D object detection as an end-to-end optimization problem. To address this problem, we propose ImVoxelNet, a novel fully convolutional method of 3D object detection based on monocular or multi-view RGB images. The number of monocular images in each multi-view input can variate during training and inference; actually, this number might be unique for each multi-view input. ImVoxelNet successfully handles both indoor and outdoor scenes, which makes it general-purpose. Specifically, it achieves state-of-the-art results in car detection on KITTI (monocular) and nuScenes (multi-view) benchmarks among all methods that accept RGB images. Moreover, it surpasses existing RGB-based 3D object detection methods on the SUN RGB-D dataset. On ScanNet, ImVoxelNet sets a new benchmark for multi-view 3D object detection. The source code and the trained models are available at \url{https://github.com/saic-vul/imvoxelnet}.