 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Tracking through Human-Robot Sensory Augmentation
Paper and Code
Feb 17, 2020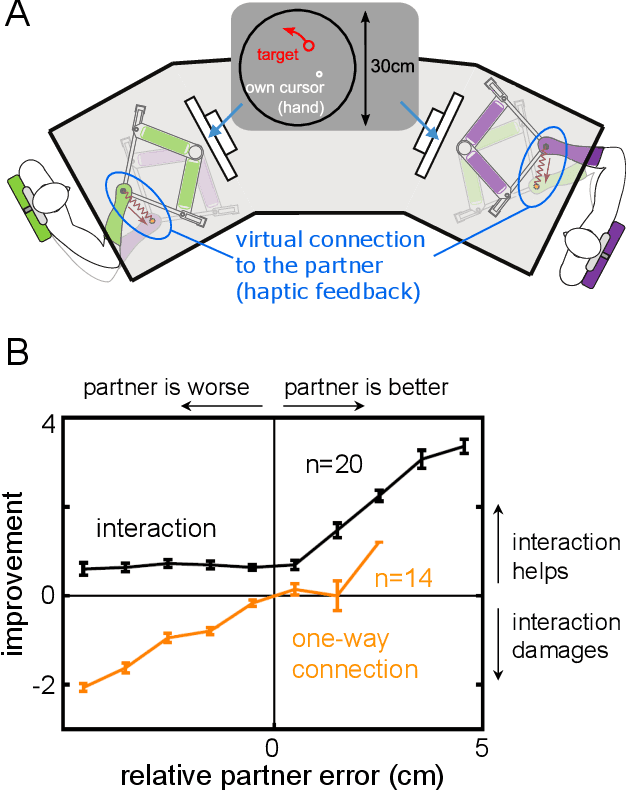
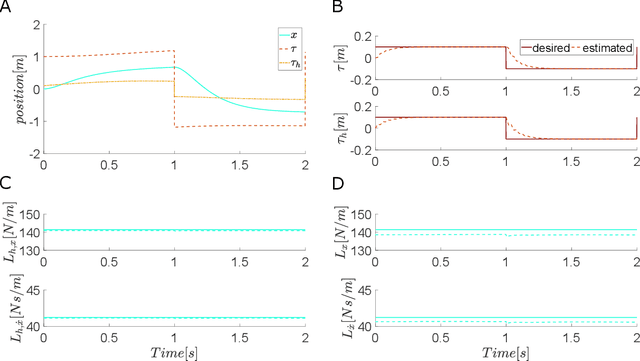
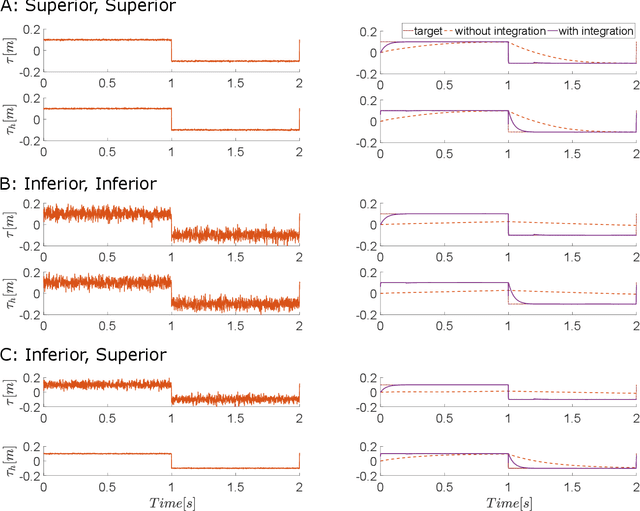
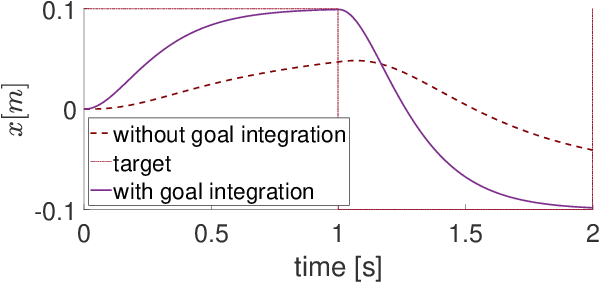
This paper introduces human-robot sensory augmentation and illustrates it on a tracking task, where performance can be improved by the exchange of sensory information between the robot and its human user. It was recently found that during interaction between humans, the partners use each other's sensory information to improve their own sensing, thus also their performance and learning. In this paper, we develop a computational model of this unique human ability, and use it to build a novel control framework for human-robot interaction. The human partner's control is formulated as a feedback control with unknown control gains and desired trajectory. A Kalman filter is used to estimate first the control gains and then the desired trajectory. The estimated human partner's desired trajectory is used as augmented sensory information about the system and combined with the robot's measurement to estimate an uncertain target trajectory. Simulations and an implementation of the presented framework on a robotic interface validate the proposed observer-predictor pair for a tracking task. The results obtained using this robot demonstrate how the human user's control can be identified, and exhibit similar benefits of this sensory augmentation as was observed between interacting humans.