 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Hyperparameter Optimization by Planning Ahead
Paper and Code
Oct 15, 2021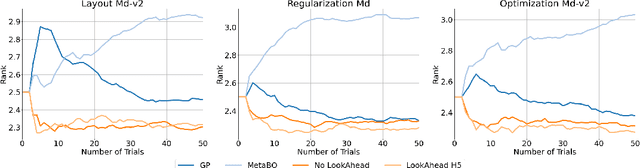

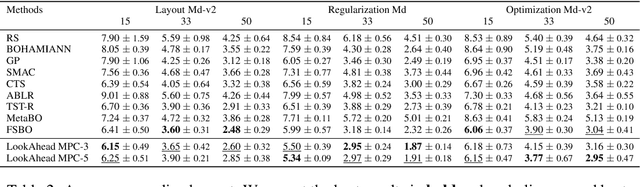
Hyperparameter optimization (HPO) is generally treated as a bi-level optimization problem that involves fitting a (probabilistic) surrogate model to a set of observed hyperparameter responses, e.g. validation loss, and consequently maximizing an acquisition function using a surrogate model to identify good hyperparameter candidates for evaluation. The choice of a surrogate and/or acquisition function can be further improved via knowledge transfer across related tasks. In this paper, we propose a novel transfer learning approach, defined within the context of model-based reinforcement learning, where we represent the surrogate as an ensemble of probabilistic models that allows trajectory sampling. We further propose a new variant of model predictive control which employs a simple look-ahead strategy as a policy that optimizes a sequence of actions, representing hyperparameter candidates to expedite HPO. Our experiments on three meta-datasets comparing to state-of-the-art HPO algorithms including a model-free reinforcement learning approach show that the proposed method can outperform all baselines by exploiting a simple planning-based policy.