Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIMMVP: An Efficient Daytime and Nighttime On-Road Object Detector
Paper and Code

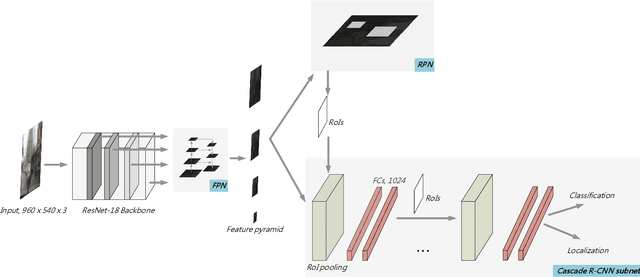
It is hard to detect on-road objects under various lighting conditions. To improve the quality of the classifier, three techniques are used. We define subclasses to separate daytime and nighttime samples. Then we skip similar samples in the training set to prevent overfitting. With the help of the outside training samples, the detection accuracy is also improved. To detect objects in an edge device, Nvidia Jetson TX2 platform, we exert the lightweight model ResNet-18 FPN as the backbone feature extractor. The FPN (Feature Pyramid Network) generates good features for detecting objects over various scales. With Cascade R-CNN technique, the bounding boxes are iteratively refined for better results.
* Accepted at IEEE 21st International Workshop on Multimedia Signal
Processing (MMSP 2019)
View paper on