 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning Inputting Image Feature to Each Layer of Neural Network
Paper and Code
Jan 19, 2024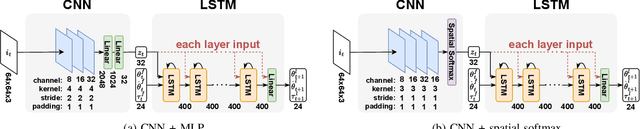
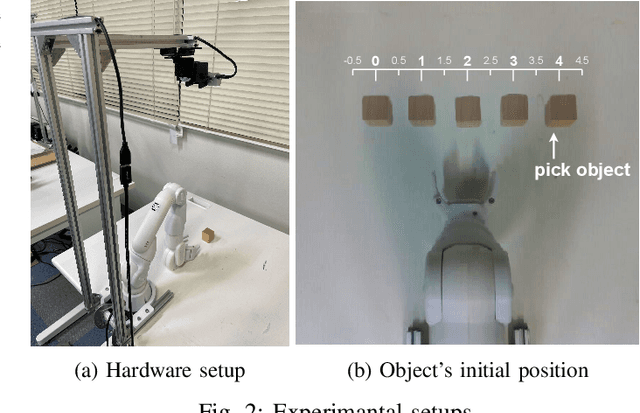
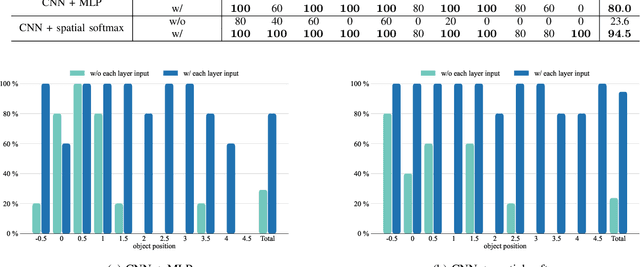
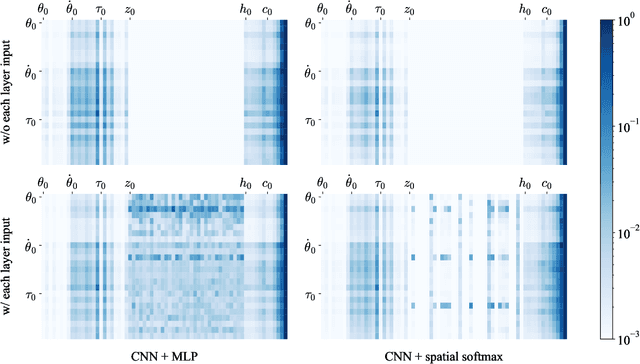
Imitation learning enables robots to learn and replicate human behavior from training data. Recent advances in machine learning enable end-to-end learning approaches that directly process high-dimensional observation data, such as images. However, these approaches face a critical challenge when processing data from multiple modalities, inadvertently ignoring data with a lower correlation to the desired output, especially when using short sampling periods. This paper presents a useful method to address this challenge, which amplifies the influence of data with a relatively low correlation to the output by inputting the data into each neural network layer. The proposed approach effectively incorporates diverse data sources into the learning process. Through experiments using a simple pick-and-place operation with raw images and joint information as input, significant improvements in success rates are demonstrated even when dealing with data from short sampling periods.