 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning for Nonprehensile Manipulation through Self-Supervised Learning Considering Motion Speed
Paper and Code
Jun 22, 2022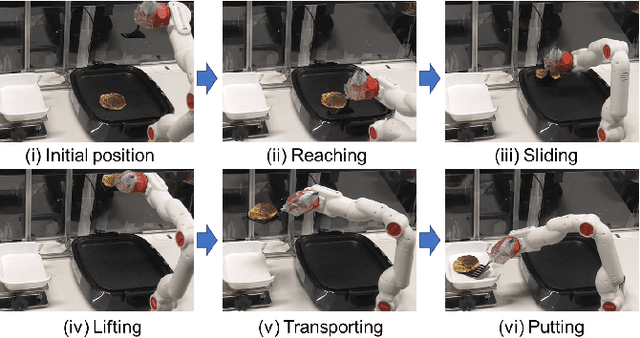
Robots are expected to replace menial tasks such as housework. Some of these tasks include nonprehensile manipulation performed without grasping objects. Nonprehensile manipulation is very difficult because it requires considering the dynamics of environments and objects. Therefore imitating complex behaviors requires a large number of human demonstrations. In this study, a self-supervised learning that considers dynamics to achieve variable speed for nonprehensile manipulation is proposed. The proposed method collects and fine-tunes only successful action data obtained during autonomous operations. By fine-tuning the successful data, the robot learns the dynamics among itself, its environment, and objects. We experimented with the task of scooping and transporting pancakes using the neural network model trained on 24 human-collected training data. The proposed method significantly improved the success rate from 40.2% to 85.7%, and succeeded the task more than 75% for other objects.