 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImaging with highly incomplete and corrupted data
Paper and Code
Aug 05, 2019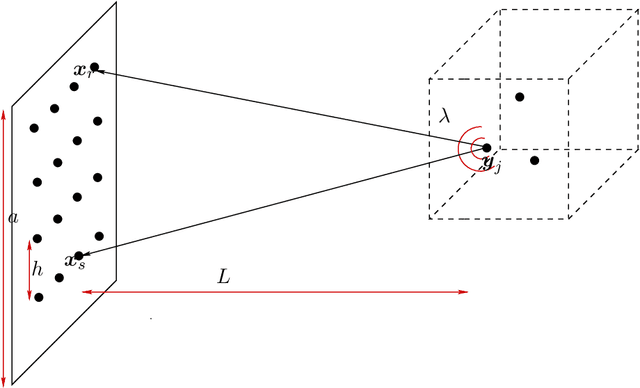
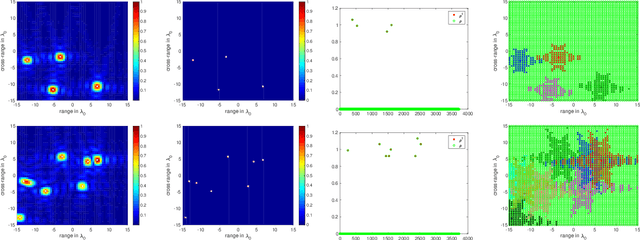
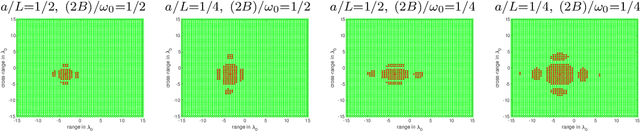
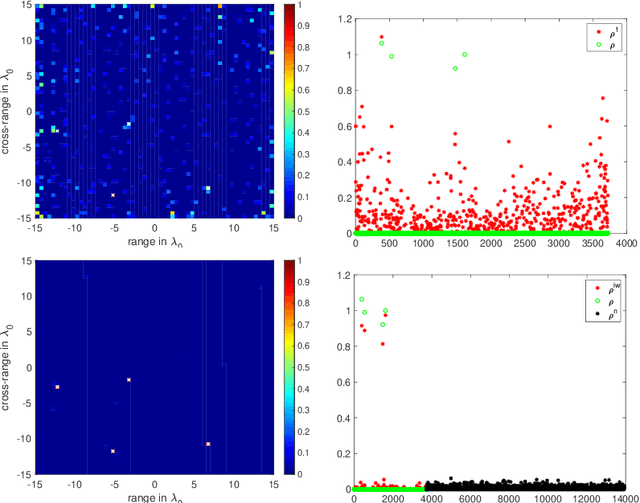
We consider the problem of imaging sparse scenes from a few noisy data using an $l_1$-minimization approach. This problem can be cast as a linear system of the form $A \, \rho =b$, where $A$ is an $N\times K$ measurement matrix. We assume that the dimension of the unknown sparse vector $\rho \in {\mathbb{C}}^K$ is much larger than the dimension of the data vector $b \in {\mathbb{C}}^N$, i.e, $K \gg N$. We provide a theoretical framework that allows us to examine under what conditions the $\ell_1$-minimization problem admits a solution that is close to the exact one in the presence of noise. Our analysis shows that $l_1$-minimization is not robust for imaging with noisy data when high resolution is required. To improve the performance of $l_1$-minimization we propose to solve instead the augmented linear system $ [A \, | \, C] \rho =b$, where the $N \times \Sigma$ matrix $C$ is a noise collector. It is constructed so as its column vectors provide a frame on which the noise of the data, a vector of dimension $N$, can be well approximated. Theoretically, the dimension $\Sigma$ of the noise collector should be $e^N$ which would make its use not practical. However, our numerical results illustrate that robust results in the presence of noise can be obtained with a large enough number of columns $\Sigma \approx 10 K$.