Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage Captioning and Classification of Dangerous Situations
Paper and Code
Nov 07, 2017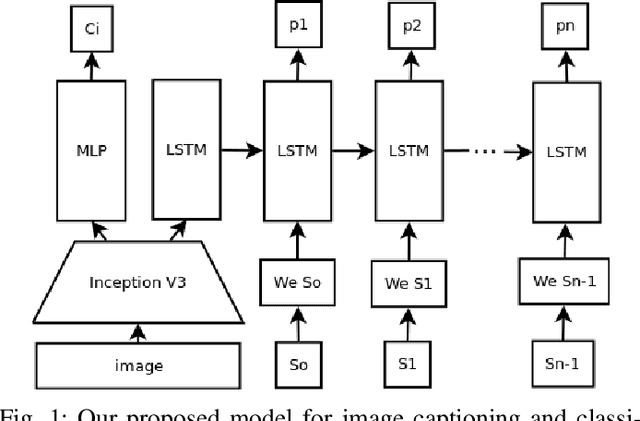
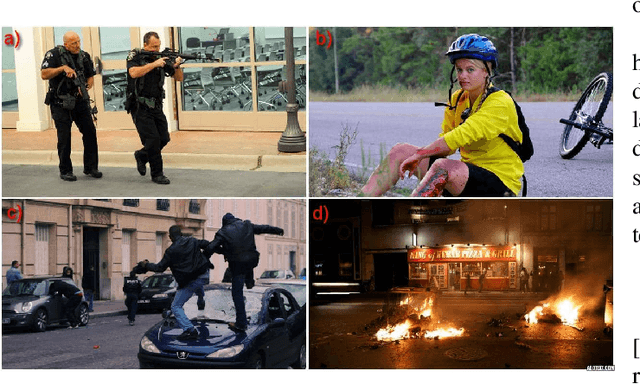

Current robot platforms are being employed to collaborate with humans in a wide range of domestic and industrial tasks. These environments require autonomous systems that are able to classify and communicate anomalous situations such as fires, injured persons, car accidents; or generally, any potentially dangerous situation for humans. In this paper we introduce an anomaly detection dataset for the purpose of robot applications as well as the design and implementation of a deep learning architecture that classifies and describes dangerous situations using only a single image as input. We report a classification accuracy of 97 % and METEOR score of 16.2. We will make the dataset publicly available after this paper is accepted.
View paper on