 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIDLL: Inverse Depth Line based Visual Localization in Challenging Environments
Paper and Code
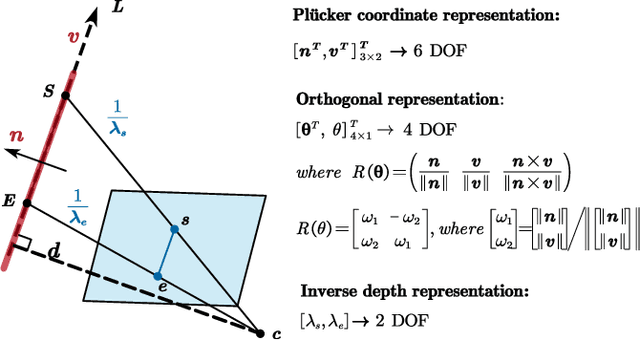
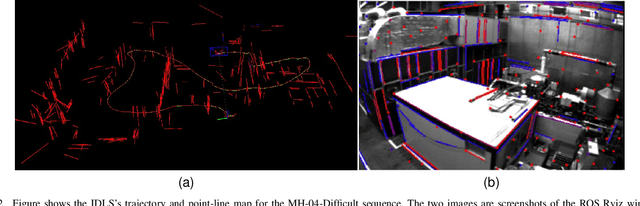
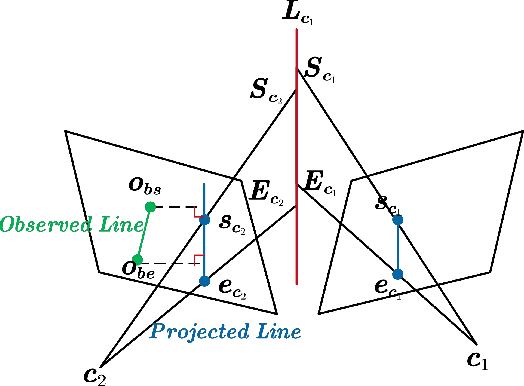
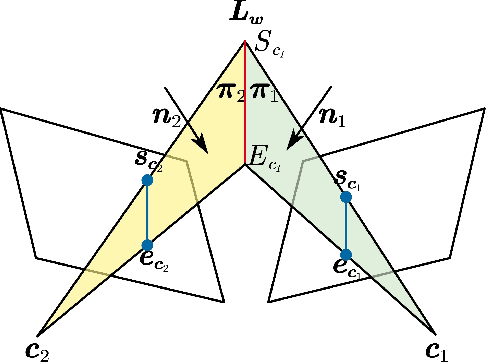
Precise and real-time localization of unmanned aerial vehicles (UAVs) or robots in GNSS denied indoor environments are critically important for various logistics and surveillance applications. Vision-based simultaneously locating and mapping (VSLAM) are key solutions but suffer location drifts in texture-less, man-made indoor environments. Line features are rich in man-made environments which can be exploited to improve the localization robustness, but existing point-line based VSLAM methods still lack accuracy and efficiency for the representation of lines introducing unnecessary degrees of freedoms. In this paper, we propose Inverse Depth Line Localization(IDLL), which models each extracted line feature using two inverse depth variables exploiting the fact that the projected pixel coordinates on the image plane are rather accurate, which partially restrict the lines. This freedom-reduced representation of lines enables easier line determination and faster convergence of bundle adjustment in each step, therefore achieves more accurate and more efficient frame-to-frame registration and frame-to-map registration using both point and line visual features. We redesign the whole front-end and back-end modules of VSLAM using this line model. IDLL is extensively evaluated in multiple perceptually-challenging datasets. The results show it is more accurate, robust, and needs lower computational overhead than the current state-of-the-art of feature-based VSLAM methods.