 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiDF-SLAM: End-to-End RGB-D SLAM with Neural Implicit Mapping and Deep Feature Tracking
Paper and Code
Sep 16, 2022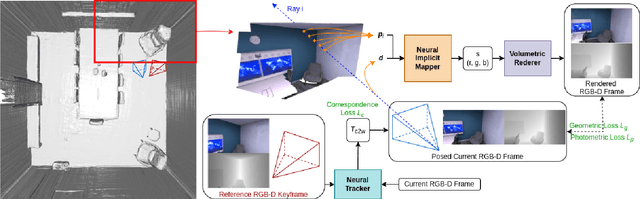
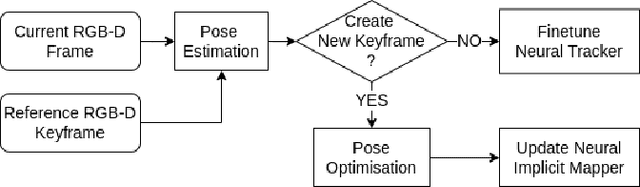
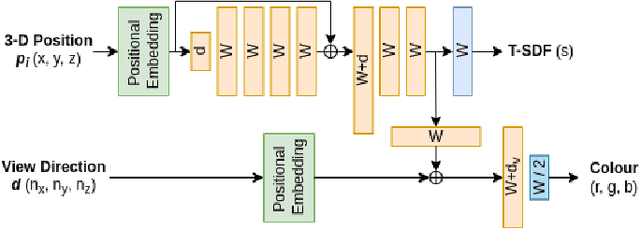
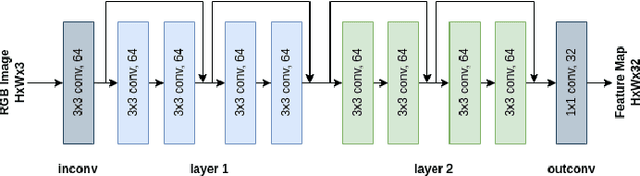
We propose a novel end-to-end RGB-D SLAM, iDF-SLAM, which adopts a feature-based deep neural tracker as the front-end and a NeRF-style neural implicit mapper as the back-end. The neural implicit mapper is trained on-the-fly, while though the neural tracker is pretrained on the ScanNet dataset, it is also finetuned along with the training of the neural implicit mapper. Under such a design, our iDF-SLAM is capable of learning to use scene-specific features for camera tracking, thus enabling lifelong learning of the SLAM system. Both the training for the tracker and the mapper are self-supervised without introducing ground truth poses. We test the performance of our iDF-SLAM on the Replica and ScanNet datasets and compare the results to the two recent NeRF-based neural SLAM systems. The proposed iDF-SLAM demonstrates state-of-the-art results in terms of scene reconstruction and competitive performance in camera tracking.