 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeICON$^2$: Reliably Benchmarking Predictive Inequity in Object Detection
Paper and Code
Jun 07, 2023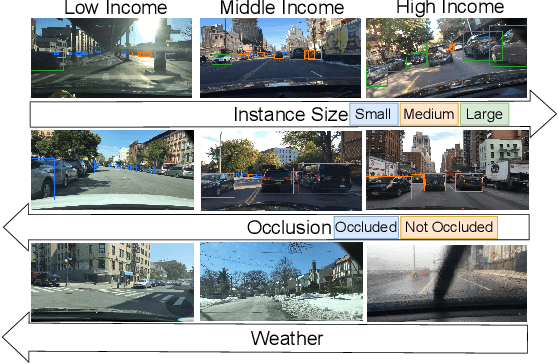
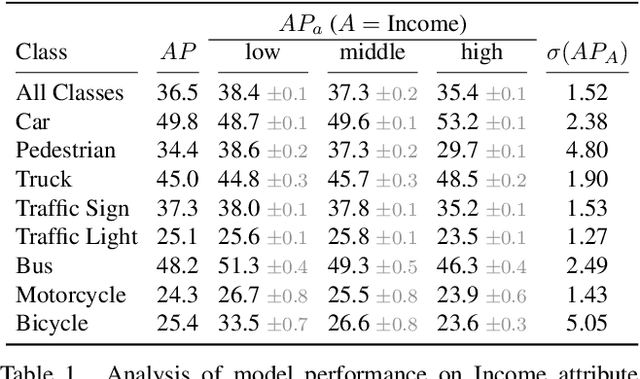
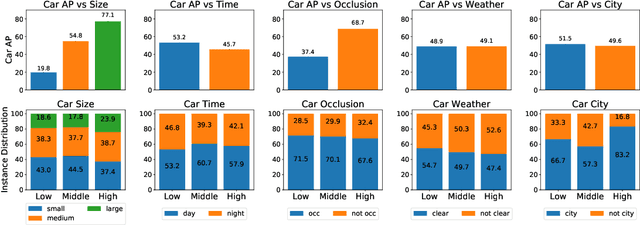
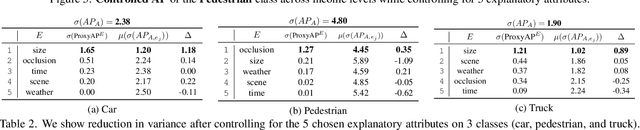
As computer vision systems are being increasingly deployed at scale in high-stakes applications like autonomous driving, concerns about social bias in these systems are rising. Analysis of fairness in real-world vision systems, such as object detection in driving scenes, has been limited to observing predictive inequity across attributes such as pedestrian skin tone, and lacks a consistent methodology to disentangle the role of confounding variables e.g. does my model perform worse for a certain skin tone, or are such scenes in my dataset more challenging due to occlusion and crowds? In this work, we introduce ICON$^2$, a framework for robustly answering this question. ICON$^2$ leverages prior knowledge on the deficiencies of object detection systems to identify performance discrepancies across sub-populations, compute correlations between these potential confounders and a given sensitive attribute, and control for the most likely confounders to obtain a more reliable estimate of model bias. Using our approach, we conduct an in-depth study on the performance of object detection with respect to income from the BDD100K driving dataset, revealing useful insights.