 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeICM-3D: Instantiated Category Modeling for 3D Instance Segmentation
Paper and Code
Aug 26, 2021

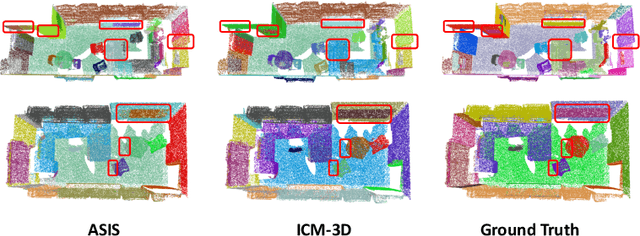

Separating 3D point clouds into individual instances is an important task for 3D vision. It is challenging due to the unknown and varying number of instances in a scene. Existing deep learning based works focus on a two-step pipeline: first learn a feature embedding and then cluster the points. Such a two-step pipeline leads to disconnected intermediate objectives. In this paper, we propose an integrated reformulation of 3D instance segmentation as a per-point classification problem. We propose ICM-3D, a single-step method to segment 3D instances via instantiated categorization. The augmented category information is automatically constructed from 3D spatial positions. We conduct extensive experiments to verify the effectiveness of ICM-3D and show that it obtains inspiring performance across multiple frameworks, backbones and benchmarks.