 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeI2I: Image to Icosahedral Projection for $\mathrm{SO}(3)$ Object Reasoning from Single-View Images
Paper and Code
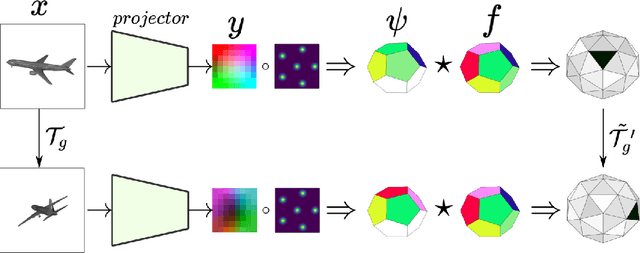
Reasoning about 3D objects based on 2D images is challenging due to large variations in appearance caused by viewing the object from different orientations. Ideally, our model would be invariant or equivariant to changes in object pose. Unfortunately, this is typically not possible with 2D image input because we do not have an a priori model of how the image would change under out-of-plane object rotations. The only $\mathrm{SO}(3)$-equivariant models that currently exist require point cloud input rather than 2D images. In this paper, we propose a novel model architecture based on icosahedral group convolution that reasons in $\mathrm{SO(3)}$ by projecting the input image onto an icosahedron. As a result of this projection, the model is approximately equivariant to rotation in $\mathrm{SO}(3)$. We apply this model to an object pose estimation task and find that it outperforms reasonable baselines.