 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperbolic Uncertainty Aware Semantic Segmentation
Paper and Code
Mar 16, 2022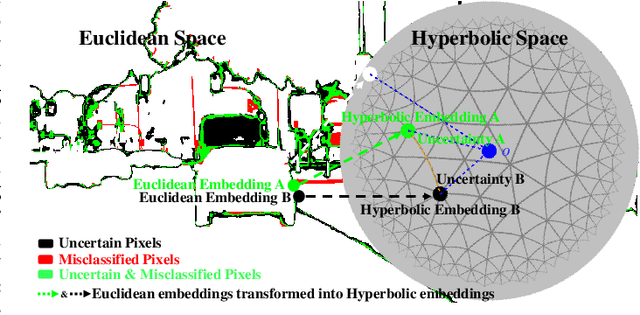
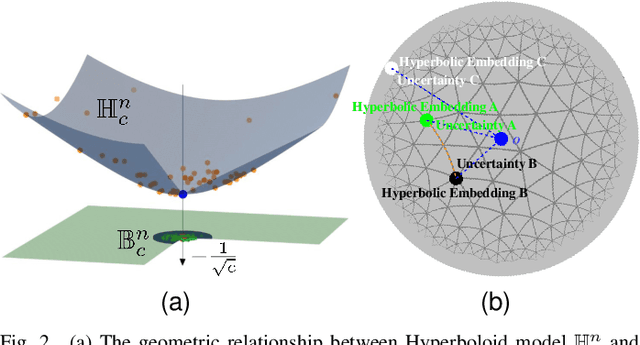
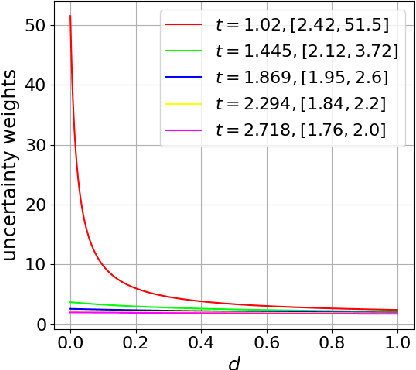
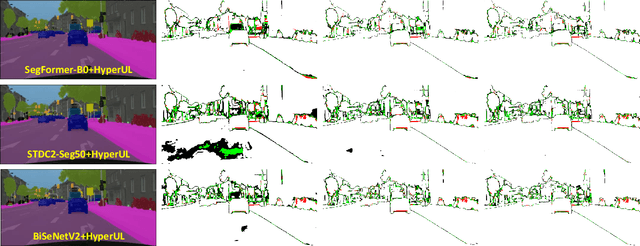
Semantic segmentation (SS) aims to classify each pixel into one of the pre-defined classes. This task plays an important role in self-driving cars and autonomous drones. In SS, many works have shown that most misclassified pixels are commonly near object boundaries with high uncertainties. However, existing SS loss functions are not tailored to handle these uncertain pixels during training, as these pixels are usually treated equally as confidently classified pixels and cannot be embedded with arbitrary low distortion in Euclidean space, thereby degenerating the performance of SS. To overcome this problem, this paper designs a "Hyperbolic Uncertainty Loss" (HyperUL), which dynamically highlights the misclassified and high-uncertainty pixels in Hyperbolic space during training via the hyperbolic distances. The proposed HyperUL is model agnostic and can be easily applied to various neural architectures. After employing HyperUL to three recent SS models, the experimental results on Cityscapes and UAVid datasets reveal that the segmentation performance of existing SS models can be consistently improved.