Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Collaboration via Deep Reinforcement Learning of Real-World Interactions
Paper and Code
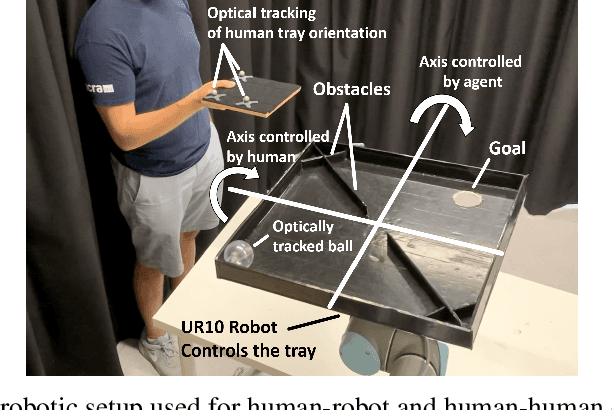
We present a robotic setup for real-world testing and evaluation of human-robot and human-human collaborative learning. Leveraging the sample-efficiency of the Soft Actor-Critic algorithm, we have implemented a robotic platform able to learn a non-trivial collaborative task with a human partner, without pre-training in simulation, and using only 30 minutes of real-world interactions. This enables us to study Human-Robot and Human-Human collaborative learning through real-world interactions. We present preliminary results, showing that state-of-the-art deep learning methods can take human-robot collaborative learning a step closer to that of humans interacting with each other.
* Presented at NeurIPS'19 Workshop on Robot Learning: Control and
Interaction in the Real World
View paper on