Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Position Detection & Tracking with On-robot Time-of-Flight Laser Ranging Sensors
Paper and Code
Sep 21, 2019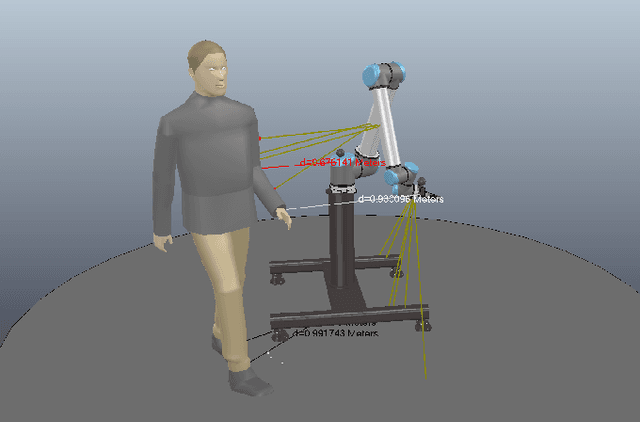
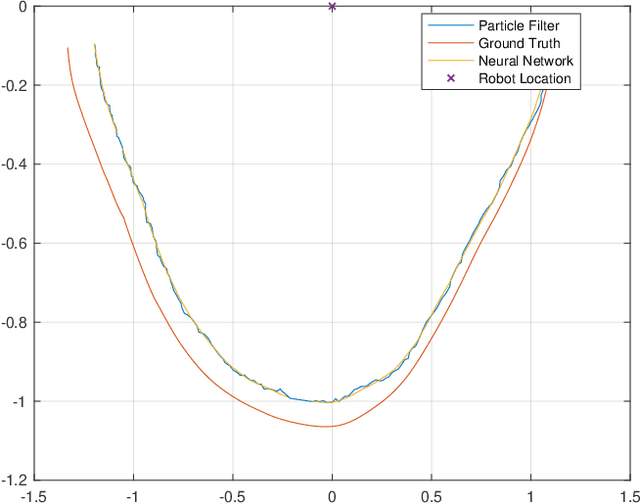
In this paper, we propose a simple methodology to detect the partial pose of a human occupying the manipulator work-space using only on-robot time--of--flight laser ranging sensors. The sensors are affixed on each link of the robot in a circular array fashion where each array possesses sixteen single unit laser ranging lidar(s). The detection is performed by leveraging an artificial neural network which takes a highly sparse 3-D point cloud input to produce an estimate of the partial pose which is the ground projection frame of the human footprint. We also present a particle filter based approach to the tracking problem when the input data is unreliable. Ultimately, the simulation results are presented and analyzed.
View paper on