 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHSFusion: A high-level vision task-driven infrared and visible image fusion network via semantic and geometric domain transformation
Paper and Code
Jul 14, 2024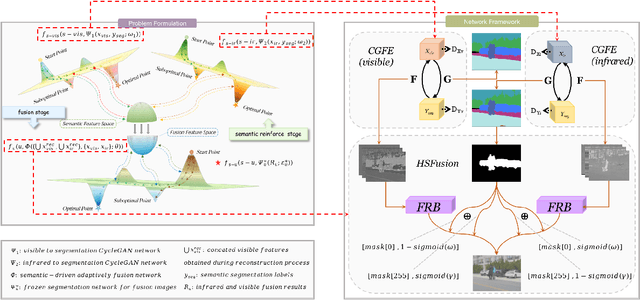

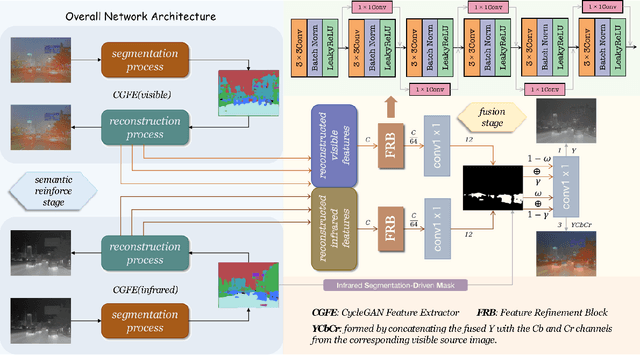
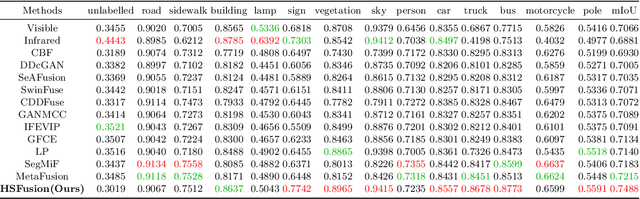
Infrared and visible image fusion has been developed from vision perception oriented fusion methods to strategies which both consider the vision perception and high-level vision task. However, the existing task-driven methods fail to address the domain gap between semantic and geometric representation. To overcome these issues, we propose a high-level vision task-driven infrared and visible image fusion network via semantic and geometric domain transformation, terms as HSFusion. Specifically, to minimize the gap between semantic and geometric representation, we design two separate domain transformation branches by CycleGAN framework, and each includes two processes: the forward segmentation process and the reverse reconstruction process. CycleGAN is capable of learning domain transformation patterns, and the reconstruction process of CycleGAN is conducted under the constraint of these patterns. Thus, our method can significantly facilitate the integration of semantic and geometric information and further reduces the domain gap. In fusion stage, we integrate the infrared and visible features that extracted from the reconstruction process of two seperate CycleGANs to obtain the fused result. These features, containing varying proportions of semantic and geometric information, can significantly enhance the high level vision tasks. Additionally, we generate masks based on segmentation results to guide the fusion task. These masks can provide semantic priors, and we design adaptive weights for two distinct areas in the masks to facilitate image fusion. Finally, we conducted comparative experiments between our method and eleven other state-of-the-art methods, demonstrating that our approach surpasses others in both visual appeal and semantic segmentation task.