 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow degenerate is the parametrization of neural networks with the ReLU activation function?
Paper and Code
May 23, 2019


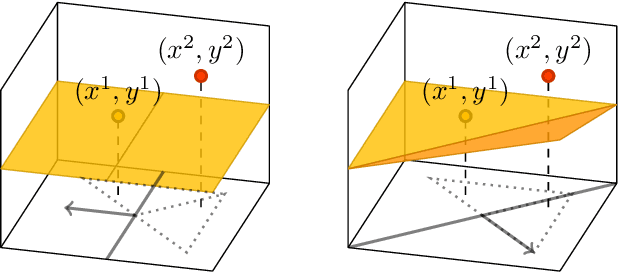
Neural network training is usually accomplished by solving a non-convex optimization problem using stochastic gradient descent. Although one optimizes over the networks parameters, the loss function generally only depends on the realization of a neural network, i.e. the function it computes. Studying the functional optimization problem over the space of realizations can open up completely new ways to understand neural network training. In particular, usual loss functions like the mean squared error are convex on sets of neural network realizations, which themselves are non-convex. Note, however, that each realization has many different, possibly degenerate, parametrizations. In particular, a local minimum in the parametrization space needs not correspond to a local minimum in the realization space. To establish such a connection, inverse stability of the realization map is required, meaning that proximity of realizations must imply proximity of corresponding parametrizations. In this paper we present pathologies which prevent inverse stability in general, and proceed to establish a restricted set of parametrizations on which we have inverse stability w.r.t. to a Sobolev norm. Furthermore, we show that by optimizing over such restricted sets, it is still possible to learn any function, which can be learned by optimization over unrestricted sets. While most of this paper focuses on shallow networks, none of methods used are, in principle, limited to shallow networks, and it should be possible to extend them to deep neural networks.