 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHindsight Foresight Relabeling for Meta-Reinforcement Learning
Paper and Code
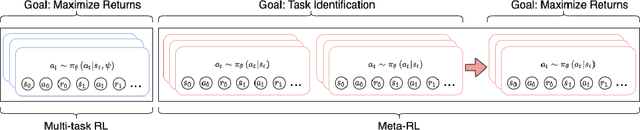
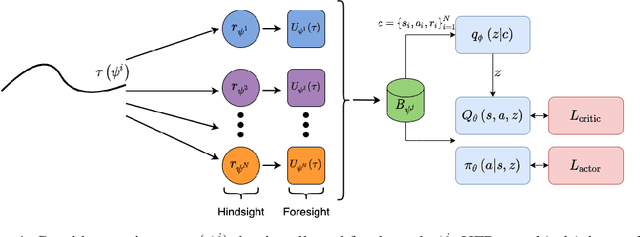
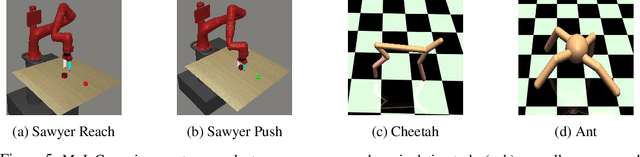

Meta-reinforcement learning (meta-RL) algorithms allow for agents to learn new behaviors from small amounts of experience, mitigating the sample inefficiency problem in RL. However, while meta-RL agents can adapt quickly to new tasks at test time after experiencing only a few trajectories, the meta-training process is still sample-inefficient. Prior works have found that in the multi-task RL setting, relabeling past transitions and thus sharing experience among tasks can improve sample efficiency and asymptotic performance. We apply this idea to the meta-RL setting and devise a new relabeling method called Hindsight Foresight Relabeling (HFR). We construct a relabeling distribution using the combination of "hindsight", which is used to relabel trajectories using reward functions from the training task distribution, and "foresight", which takes the relabeled trajectories and computes the utility of each trajectory for each task. HFR is easy to implement and readily compatible with existing meta-RL algorithms. We find that HFR improves performance when compared to other relabeling methods on a variety of meta-RL tasks.