 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh precision indoor positioning by means of LiDAR
Paper and Code
May 14, 2020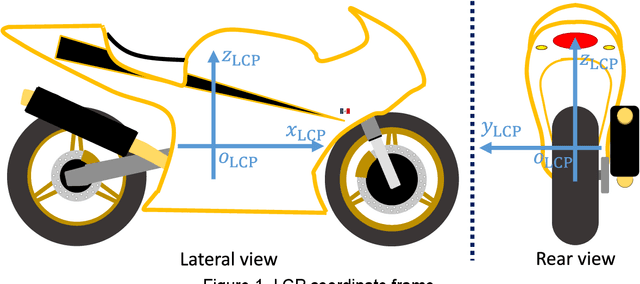
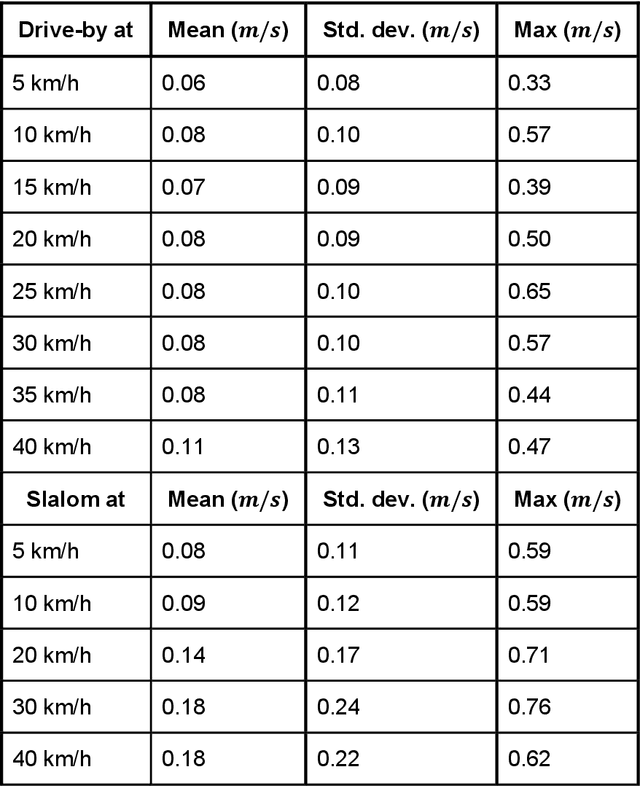
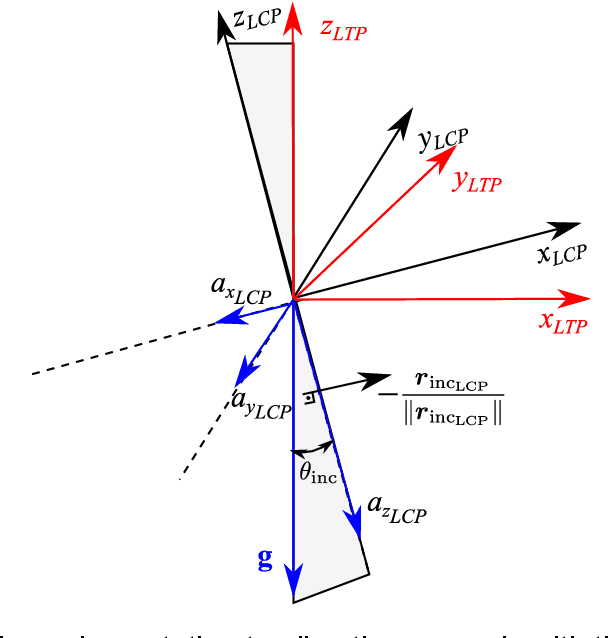
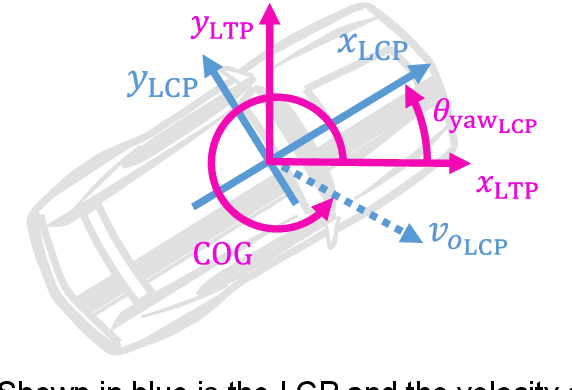
The trend towards autonomous driving and the continuous research in the automotive area, like Advanced Driver Assistance Systems (ADAS), requires an accurate localization under all circumstances. An accurate estimation of the vehicle state is a basic requirement for any trajectory-planning algorithm. Still, even when the introduction of the GPS L5 band promises lane-accuracy, coverage limitations in roofed areas still have to be addressed. In this work, a method for high precision indoor positioning using a LiDAR is presented. The method is based on the combination of motion models with LiDAR measurements, and uses infrastructural elements as positioning references. This allows to estimate the orientation, velocity over ground and position of a vehicle in a Local Tangent Plane (LTP) reference frame. When the outputs of the proposed method are compared to those of an Automotive Dynamic Motion Analyzer (ADMA), mean errors of 1 degree, 0.1 m/s and of 4.7 cm respectively are obtained. The method can be implemented by using a LiDAR sensor as a stand-alone unit. A median runtime of 40.77 us on an Intel i7-6820HQ CPU signals the possibility of real-time processing.