 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Trajectory (Re)Planning for a Large Scale Swarm
Paper and Code
Jan 28, 2025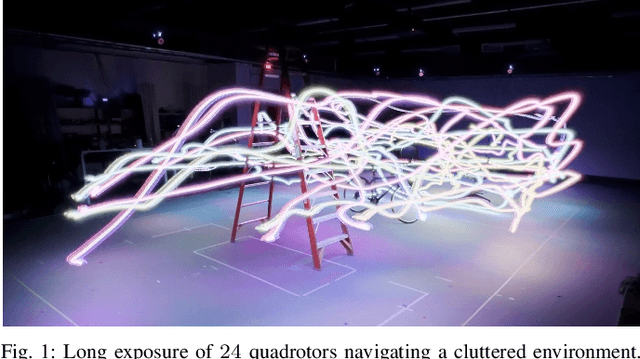
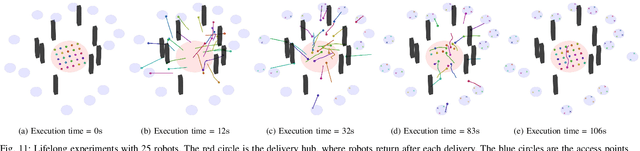
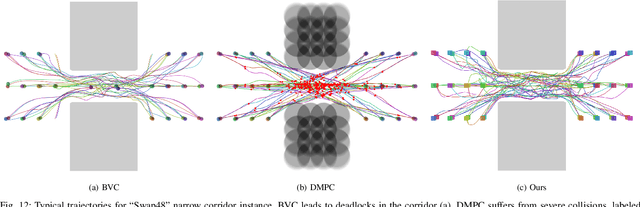
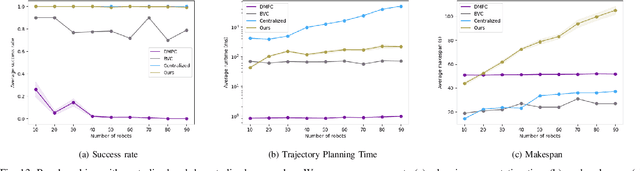
We consider the trajectory replanning problem for a large-scale swarm in a cluttered environment. Our path planner replans for robots by utilizing a hierarchical approach, dividing the workspace, and computing collision-free paths for robots within each cell in parallel. Distributed trajectory optimization generates a deadlock-free trajectory for efficient execution and maintains the control feasibility even when the optimization fails. Our hierarchical approach combines the benefits of both centralized and decentralized methods, achieving a high task success rate while providing real-time replanning capability. Compared to decentralized approaches, our approach effectively avoids deadlocks and collisions, significantly increasing the task success rate. We demonstrate the real-time performance of our algorithm with up to 142 robots in simulation, and a representative 24 physical Crazyflie nano-quadrotor experiment.