 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Reinforcement Learning Framework towards Multi-agent Navigation
Paper and Code
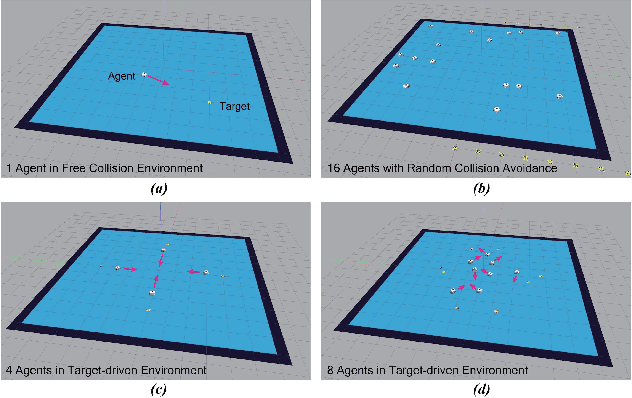
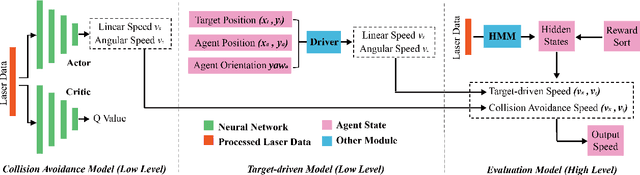
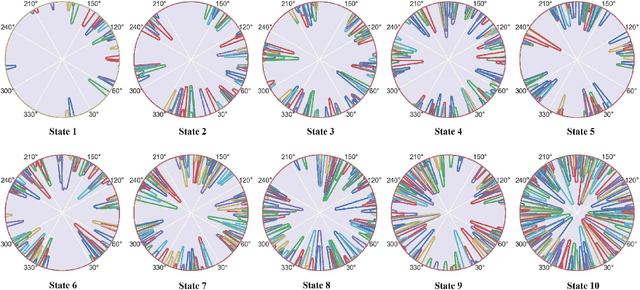
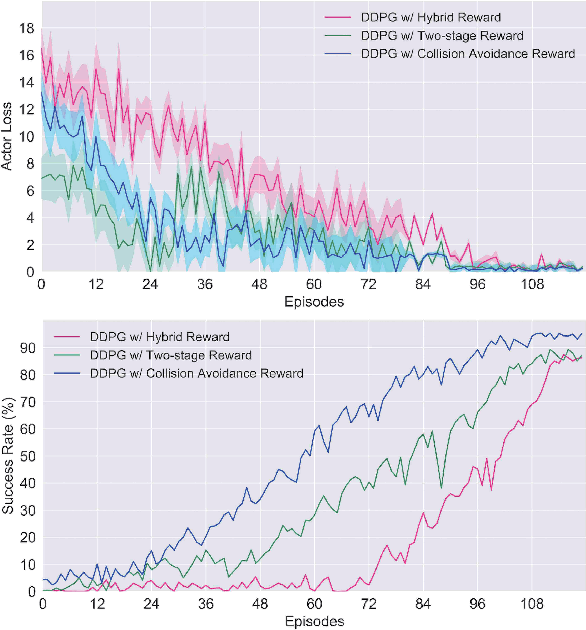
In this paper, we propose a navigation algorithm oriented to multi-agent environment. This algorithm is expressed as a hierarchical framework that contains a Hidden Markov Model (HMM) and a Deep Reinforcement Learning (DRL) structure. For simplification, we term our method Hierarchical Navigation Reinforcement Network (HNRN). In high- level architecture, we train an HMM to evaluate the agent's perception to obtain a score. According to this score, adaptive control action will be chosen. While in low-level architecture, two sub-systems are introduced, one is a differential target- driven system, which aims at heading to the target; the other is a collision avoidance DRL system, which is used for avoiding dynamic obstacles. The advantage of this hierarchical structure is decoupling the target-driven and collision avoidance tasks, leading to a faster and more stable model to be trained. The experiments indicate that our algorithm has higher learning efficiency and rate of success than traditional Velocity Obstacle (VO) algorithms or hybrid DRL method.