 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Reinforcement Learning as a Model of Human Task Interleaving
Paper and Code
Jan 04, 2020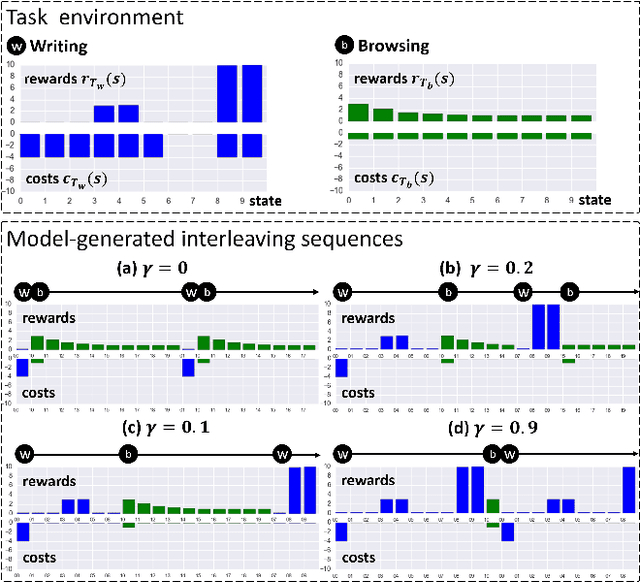
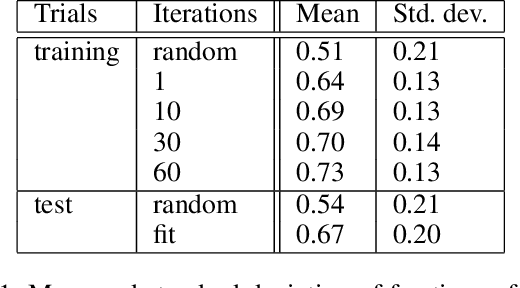
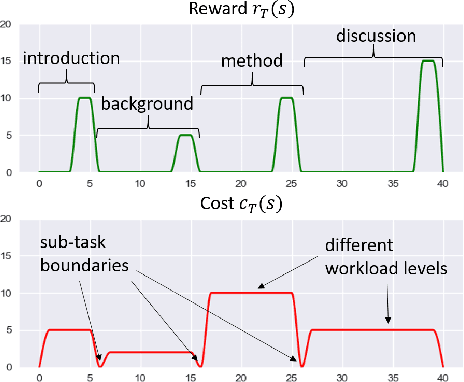
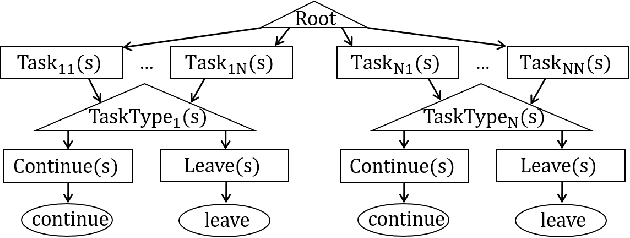
How do people decide how long to continue in a task, when to switch, and to which other task? Understanding the mechanisms that underpin task interleaving is a long-standing goal in the cognitive sciences. Prior work suggests greedy heuristics and a policy maximizing the marginal rate of return. However, it is unclear how such a strategy would allow for adaptation to everyday environments that offer multiple tasks with complex switch costs and delayed rewards. Here we develop a hierarchical model of supervisory control driven by reinforcement learning (RL). The supervisory level learns to switch using task-specific approximate utility estimates, which are computed on the lower level. A hierarchically optimal value function decomposition can be learned from experience, even in conditions with multiple tasks and arbitrary and uncertain reward and cost structures. The model reproduces known empirical effects of task interleaving. It yields better predictions of individual-level data than a myopic baseline in a six-task problem (N=211). The results support hierarchical RL as a plausible model of task interleaving.