 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeteroscedastic Uncertainty for Robust Generative Latent Dynamics
Paper and Code
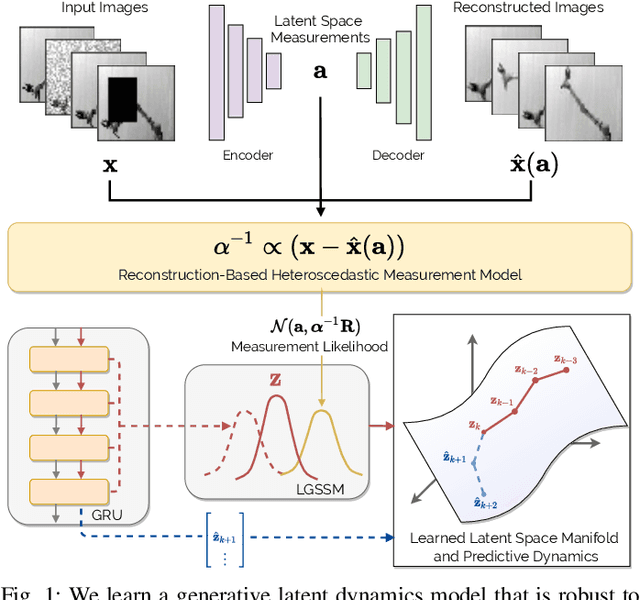
Learning or identifying dynamics from a sequence of high-dimensional observations is a difficult challenge in many domains, including reinforcement learning and control. The problem has recently been studied from a generative perspective through latent dynamics: high-dimensional observations are embedded into a lower-dimensional space in which the dynamics can be learned. Despite some successes, latent dynamics models have not yet been applied to real-world robotic systems where learned representations must be robust to a variety of perceptual confounds and noise sources not seen during training. In this paper, we present a method to jointly learn a latent state representation and the associated dynamics that is amenable for long-term planning and closed-loop control under perceptually difficult conditions. As our main contribution, we describe how our representation is able to capture a notion of heteroscedastic or input-specific uncertainty at test time by detecting novel or out-of-distribution (OOD) inputs. We present results from prediction and control experiments on two image-based tasks: a simulated pendulum balancing task and a real-world robotic manipulator reaching task. We demonstrate that our model produces significantly more accurate predictions and exhibits improved control performance, compared to a model that assumes homoscedastic uncertainty only, in the presence of varying degrees of input degradation.