 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous Edge-Enhanced Graph Attention Network For Multi-Agent Trajectory Prediction
Paper and Code
Jun 14, 2021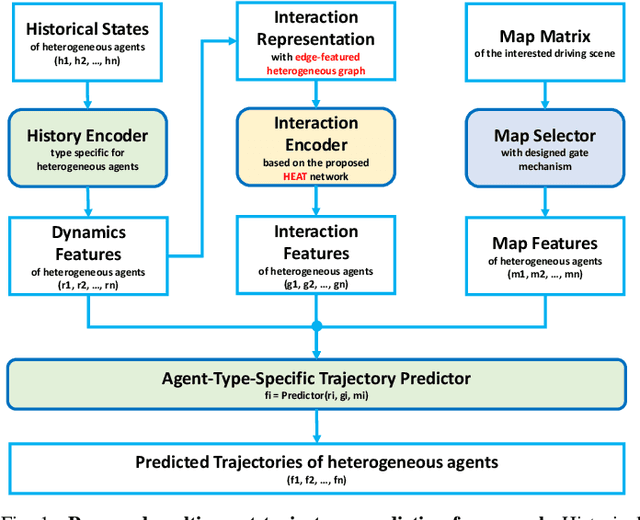
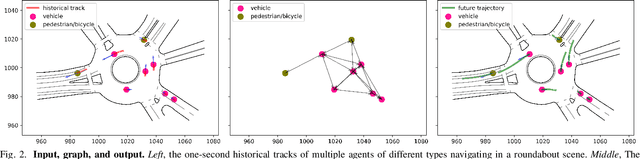
Simultaneous trajectory prediction for multiple heterogeneous traffic participants is essential for the safe and efficient operation of connected automated vehicles under complex driving situations in the real world. The multi-agent prediction task is challenging, as the motions of traffic participants are affected by many factors, including their individual dynamics, their interactions with surrounding agents, the traffic infrastructures, and the number and modalities of the target agents. To further advance the trajectory prediction techniques, in this work we propose a three-channel framework together with a novel Heterogeneous Edge-enhanced graph ATtention network (HEAT), which is able to deal with the heterogeneity of the target agents and traffic participants involved. Specifically, the agent's dynamics are extracted from their historical states using type-specific encoders. The inter-agent interactions are represented with a directed edge-featured heterogeneous graph, and then interaction features are extracted using the proposed HEAT network. Besides, the map features are shared across all agents by introducing a selective gate mechanism. And finally, the trajectories of multi-agent are executed simultaneously. Validations using both urban and highway driving datasets show that the proposed model can realize simultaneous trajectory predictions for multiple agents under complex traffic situations, and achieve state-of-the-art performance with respect to prediction accuracy, demonstrating its feasibility and effectiveness.