 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHere's What I've Learned: Asking Questions that Reveal Reward Learning
Paper and Code
Jul 02, 2021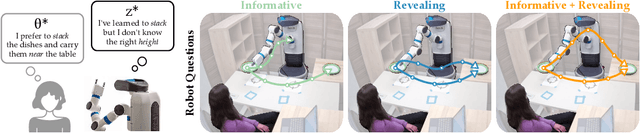
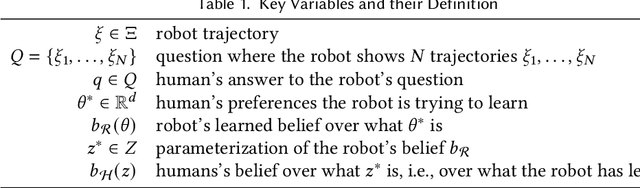
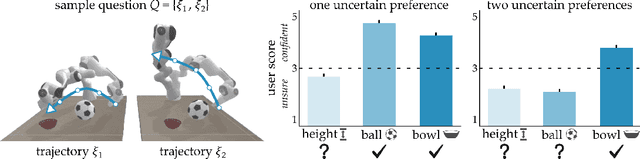
Robots can learn from humans by asking questions. In these questions the robot demonstrates a few different behaviors and asks the human for their favorite. But how should robots choose which questions to ask? Today's robots optimize for informative questions that actively probe the human's preferences as efficiently as possible. But while informative questions make sense from the robot's perspective, human onlookers often find them arbitrary and misleading. In this paper we formalize active preference-based learning from the human's perspective. We hypothesize that -- from the human's point-of-view -- the robot's questions reveal what the robot has and has not learned. Our insight enables robots to use questions to make their learning process transparent to the human operator. We develop and test a model that robots can leverage to relate the questions they ask to the information these questions reveal. We then introduce a trade-off between informative and revealing questions that considers both human and robot perspectives: a robot that optimizes for this trade-off actively gathers information from the human while simultaneously keeping the human up to date with what it has learned. We evaluate our approach across simulations, online surveys, and in-person user studies. Videos of our user studies and results are available here: https://youtu.be/tC6y_jHN7Vw.