 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHD-maps as Prior Information for Globally Consistent Mapping in GPS-denied Environments
Paper and Code
Jul 28, 2024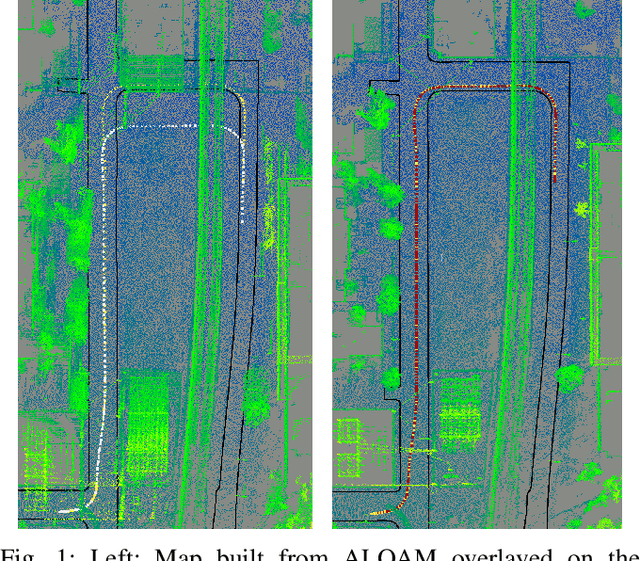

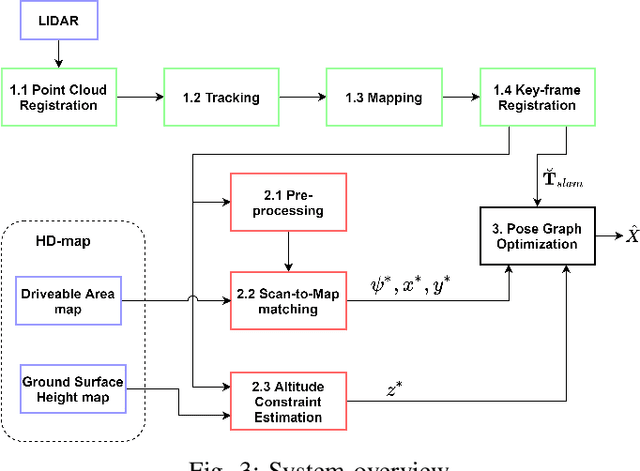

In recent years, prior maps have become a mainstream tool in autonomous navigation. However, commonly available prior maps are still tailored to control-and-decision tasks, and the use of these maps for localization remains largely unexplored. To bridge this gap, we propose a lidar-based localization and mapping (LOAM) system that can exploit the common HD-maps in autonomous driving scenarios. Specifically, we propose a technique to extract information from the drivable area and ground surface height components of the HD-maps to construct 4DOF pose priors. These pose priors are then further integrated into the pose-graph optimization problem to create a globally consistent 3D map. Experiments show that our scheme can significantly improve the global consistency of the map compared to state-of-the-art lidar-only approaches, proven to be a useful technology to enhance the system's robustness, especially in GPS-denied environment. Moreover, our work also serves as a first step towards long-term navigation of robots in familiar environment, by updating a map. In autonomous driving this could enable updating the HD-maps without sourcing a new from a third party company, which is expensive and introduces delays from change in the world to updated map.