 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHardware based Scale- and Rotation-Invariant Feature Extraction: A Retrospective Analysis and Future Directions
Paper and Code
Apr 29, 2015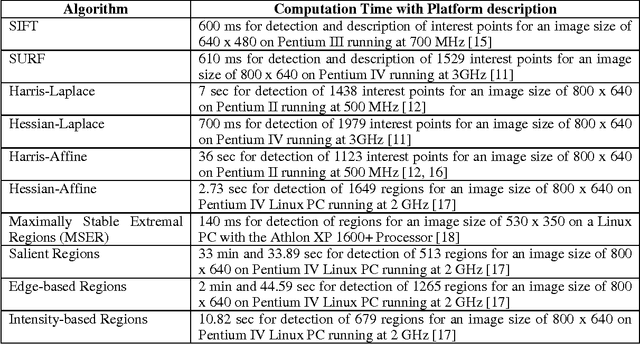
Computer Vision techniques represent a class of algorithms that are highly computation and data intensive in nature. Generally, performance of these algorithms in terms of execution speed on desktop computers is far from real-time. Since real-time performance is desirable in many applications, special-purpose hardware is required in most cases to achieve this goal. Scale- and rotation-invariant local feature extraction is a low level computer vision task with very high computational complexity. The state-of-the-art algorithms that currently exist in this domain, like SIFT and SURF, suffer from slow execution speeds and at best can only achieve rates of 2-3 Hz on modern desktop computers. Hardware-based scale- and rotation-invariant local feature extraction is an emerging trend enabling real-time performance for these computationally complex algorithms. This paper takes a retrospective look at the advances made so far in this field, discusses the hardware design strategies employed and results achieved, identifies current research gaps and suggests future research directions.