 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuided Curriculum Learning for Walking Over Complex Terrain
Paper and Code
Oct 08, 2020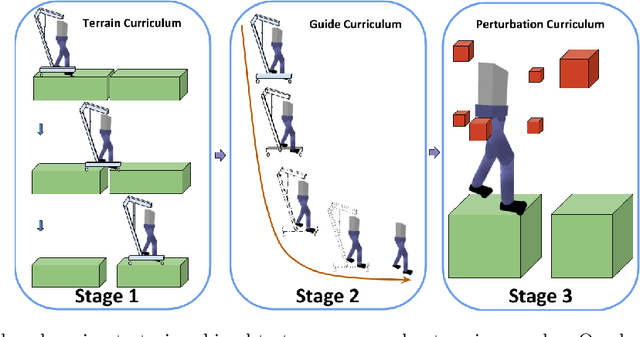
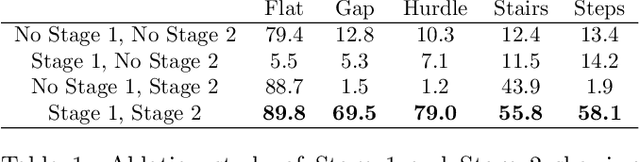
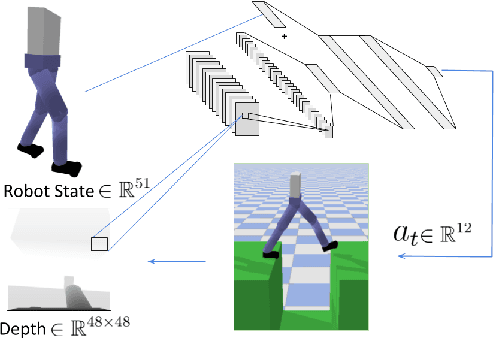

Reliable bipedal walking over complex terrain is a challenging problem, using a curriculum can help learning. Curriculum learning is the idea of starting with an achievable version of a task and increasing the difficulty as a success criteria is met. We propose a 3-stage curriculum to train Deep Reinforcement Learning policies for bipedal walking over various challenging terrains. In the first stage, the agent starts on an easy terrain and the terrain difficulty is gradually increased, while forces derived from a target policy are applied to the robot joints and the base. In the second stage, the guiding forces are gradually reduced to zero. Finally, in the third stage, random perturbations with increasing magnitude are applied to the robot base, so the robustness of the policies are improved. In simulation experiments, we show that our approach is effective in learning walking policies, separate from each other, for five terrain types: flat, hurdles, gaps, stairs, and steps. Moreover, we demonstrate that in the absence of human demonstrations, a simple hand designed walking trajectory is a sufficient prior to learn to traverse complex terrain types. In ablation studies, we show that taking out any one of the three stages of the curriculum degrades the learning performance.