 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGround material classification and for UAV-based photogrammetric 3D data A 2D-3D Hybrid Approach
Paper and Code
Sep 24, 2021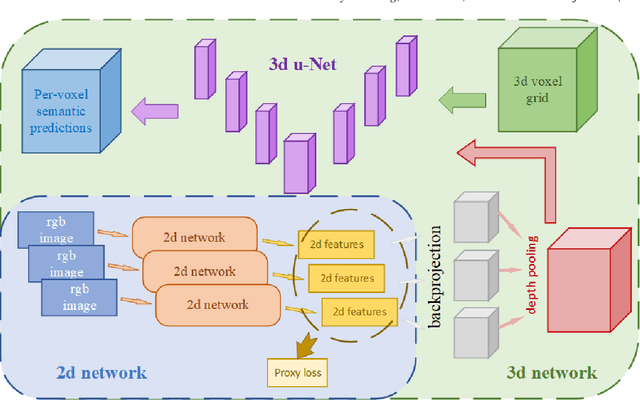
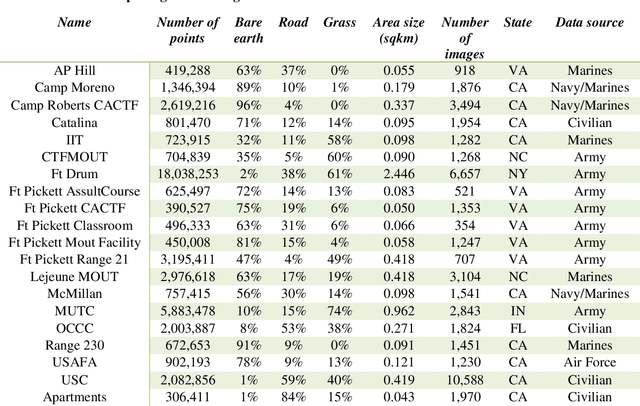
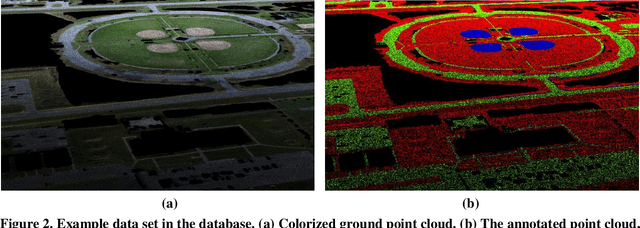
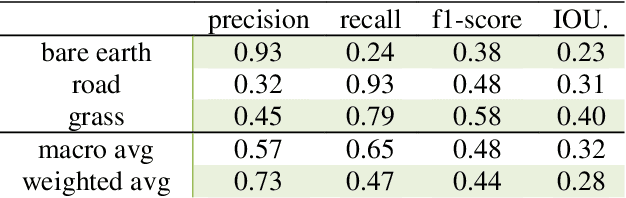
In recent years, photogrammetry has been widely used in many areas to create photorealistic 3D virtual data representing the physical environment. The innovation of small unmanned aerial vehicles (sUAVs) has provided additional high-resolution imaging capabilities with low cost for mapping a relatively large area of interest. These cutting-edge technologies have caught the US Army and Navy's attention for the purpose of rapid 3D battlefield reconstruction, virtual training, and simulations. Our previous works have demonstrated the importance of information extraction from the derived photogrammetric data to create semantic-rich virtual environments (Chen et al., 2019). For example, an increase of simulation realism and fidelity was achieved by segmenting and replacing photogrammetric trees with game-ready tree models. In this work, we further investigated the semantic information extraction problem and focused on the ground material segmentation and object detection tasks. The main innovation of this work was that we leveraged both the original 2D images and the derived 3D photogrammetric data to overcome the challenges faced when using each individual data source. For ground material segmentation, we utilized an existing convolutional neural network architecture (i.e., 3DMV) which was originally designed for segmenting RGB-D sensed indoor data. We improved its performance for outdoor photogrammetric data by introducing a depth pooling layer in the architecture to take into consideration the distance between the source images and the reconstructed terrain model. To test the performance of our improved 3DMV, a ground truth ground material database was created using data from the One World Terrain (OWT) data repository. Finally, a workflow for importing the segmented ground materials into a virtual simulation scene was introduced, and visual results are reported in this paper.