 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRIHA: Synthesizing 2-Dimensional Building Layouts from Images Captured using a Smart Phone
Paper and Code
Mar 15, 2021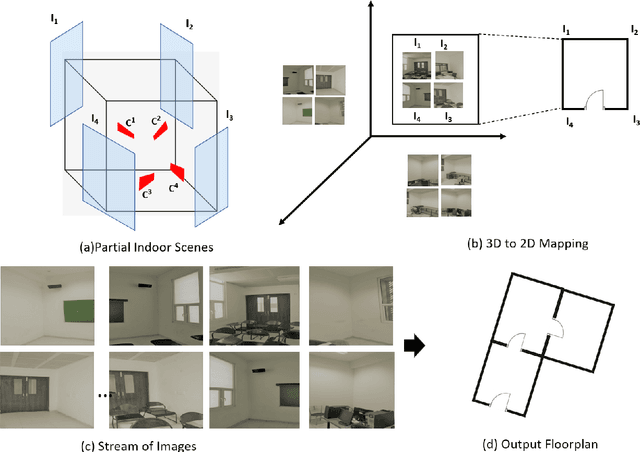


Reconstructing an indoor scene and generating a layout/floor plan in 3D or 2D is a widely known problem. Quite a few algorithms have been proposed in the literature recently. However, most existing methods either use RGB-D images, thus requiring a depth camera, or depending on panoramic photos, assuming that there is little to no occlusion in the rooms. In this work, we proposed GRIHA (Generating Room Interior of a House using ARCore), a framework for generating a layout using an RGB image captured using a simple mobile phone camera. We take advantage of Simultaneous Localization and Mapping (SLAM) to assess the 3D transformations required for layout generation. SLAM technology is built-in in recent mobile libraries such as ARCore by Google. Hence, the proposed method is fast and efficient. It gives the user freedom to generate layout by merely taking a few conventional photos, rather than relying on specialized depth hardware or occlusion-free panoramic images. We have compared GRIHA with other existing methods and obtained superior results. Also, the system is tested on multiple hardware platforms to test the dependency and efficiency.