 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrid Loss: Detecting Occluded Faces
Paper and Code
Sep 01, 2016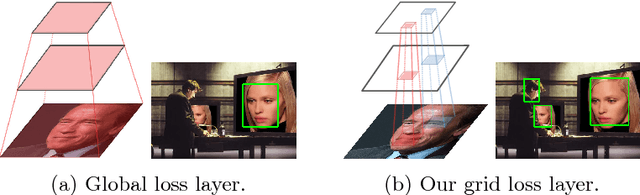
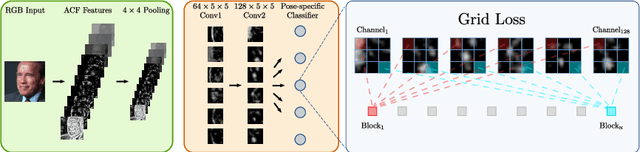
Detection of partially occluded objects is a challenging computer vision problem. Standard Convolutional Neural Network (CNN) detectors fail if parts of the detection window are occluded, since not every sub-part of the window is discriminative on its own. To address this issue, we propose a novel loss layer for CNNs, named grid loss, which minimizes the error rate on sub-blocks of a convolution layer independently rather than over the whole feature map. This results in parts being more discriminative on their own, enabling the detector to recover if the detection window is partially occluded. By mapping our loss layer back to a regular fully connected layer, no additional computational cost is incurred at runtime compared to standard CNNs. We demonstrate our method for face detection on several public face detection benchmarks and show that our method outperforms regular CNNs, is suitable for realtime applications and achieves state-of-the-art performance.